



















4 - 23
MDS-D-SVJ3/SPJ3 Series Instruction Manual
4-4 Characteristics improvement
<Variable speed loop gain control>
If vibration occurs when the motor is rotating at a high speed, such during rapid traverse, or if disturbing
noise occurs, the state can be improved by lowering the speed loop gain during high-speed rotation.
The low-speed region speed loop gain used for cutting feed (G1 feed), etc., is maintained at a high level,
so the vibration can be improved without dropping the machining accuracy.
【#2205】 SV005 VGN1 Speed loop gain 1
Set the speed loop gain.
The higher the setting value is, the more accurate the control will be, however, vibration tends to
occur.
If vibration occurs, adjust by lowering by 20 to 30%.
The value should be determined to the 70 to 80% of the value at which the vibration stops.
The value differs depending on servo motors.
Aim at the standard value determined by the servo motor type and load inertia ratio to adjust.
---Setting range---
1 to 9999
【#2206】 SV006 VGN2 Speed loop gain 2
Set the speed loop gain at the motor limitation speed VLMT (maximum rotation speed x 1.15) with
"VCS(SV029: Speed at the change of speed loop gain)".
Use this to suppress noise at high speed rotation during rapid traverse, etc. Then, the speed loop
gain decreases at faster speed than the setting value of VCS.
When not using, set to "0".
---Setting range---
-1000 to 9999
【#2229】 SV029 VCS Speed at the change of speed loop gain
Noise at high speed rotation including rapid traverse can be reduced by lowering the speed loop gain
at high speeds.
Set the speed at which the speed loop gain changes. Use this with SV006 (VGN2).
When not using, set to "0".
---Setting range---
0 to 9999 (r/min)
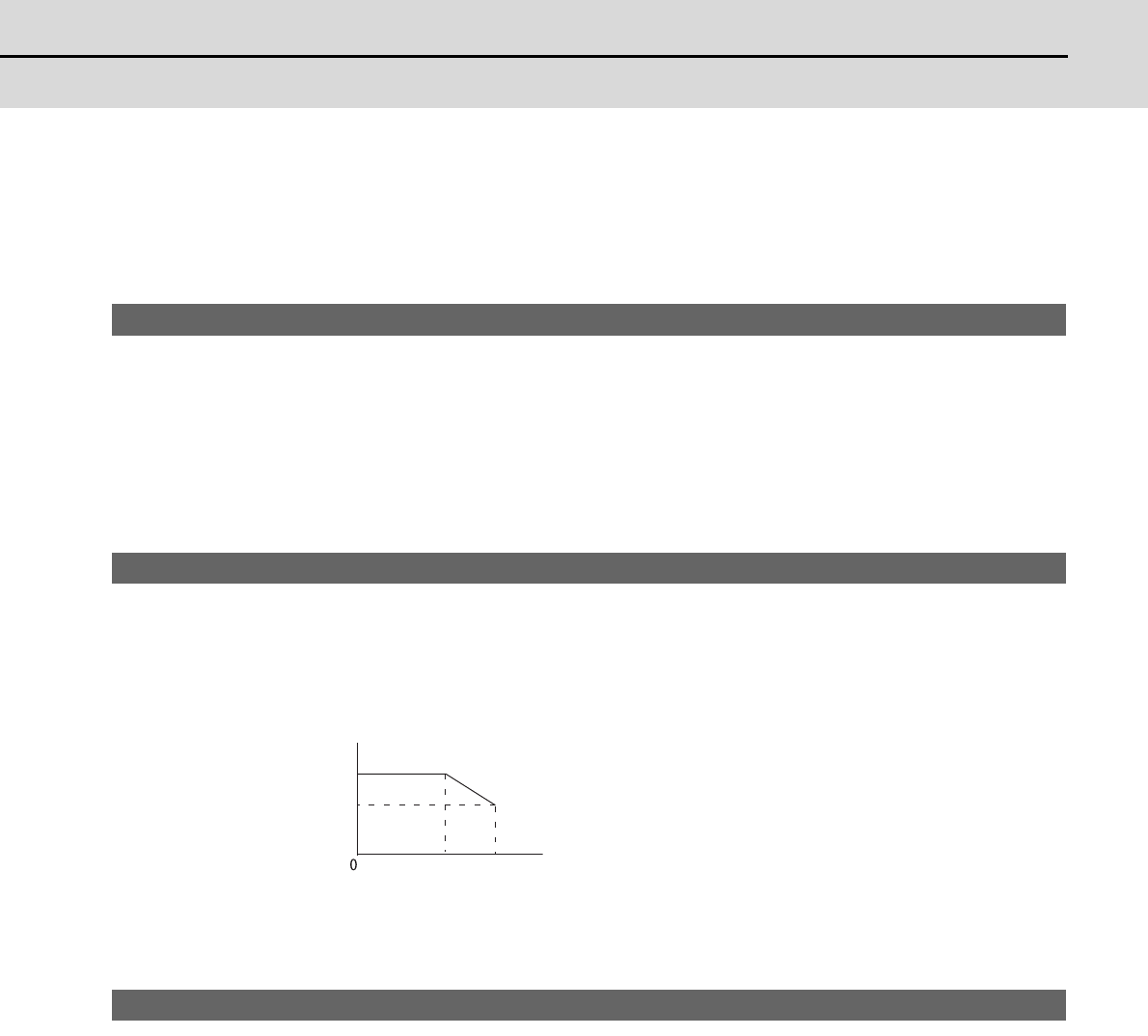
VGN1
VGN2
VCS
VLMT
Gain
Speed
(Overspeed detection speed)