



















3 - 115
MDS-D-SVJ3/SPJ3 Series Instruction Manual
3-3 Setting the initial parameters for the spindle drive unit
【#13067】 SP067 TLM3 Torque limit 3
Set the torque limit value when "the torque limit (control input 1/bitA, 9, 8) " is set to "011".
---Setting range---
0 to 999 (Short-time rated %)
【#13068】 SP068 TLM4 Torque limit 4
Set the torque limit value when "the torque limit (control input 1/bitA, 9, 8) " is set to "100".
---Setting range---
0 to 999 (Short-time rated %)
【#13069】 SP069 PCMP Phase alignment completion width
Set the single-rotation position alignment completion width for phase alignment and changing from
non-interpolation to spindle synchronization mode during rotation.
Set the rotation error that is required to the machine.
When the setting value decreases, the rotation error will decrease, but the cycle time (settling time)
will get longer. The standard setting is "875".
---Setting range---
0 to 32767 (1°/1000)
【#13070】 SP070 KDDT Phase alignment deceleration rate scale
Set the scale for SP016 (DDT) to change the deceleration rate only during rotation command
(command F ⊿ T ≠ 0).
When the setting value increases, the single-rotation position alignment will be completed faster, but
the impact to the machine will also increase. When not using, set to "0".
---Setting range---
0 to 255 (1/16-fold)
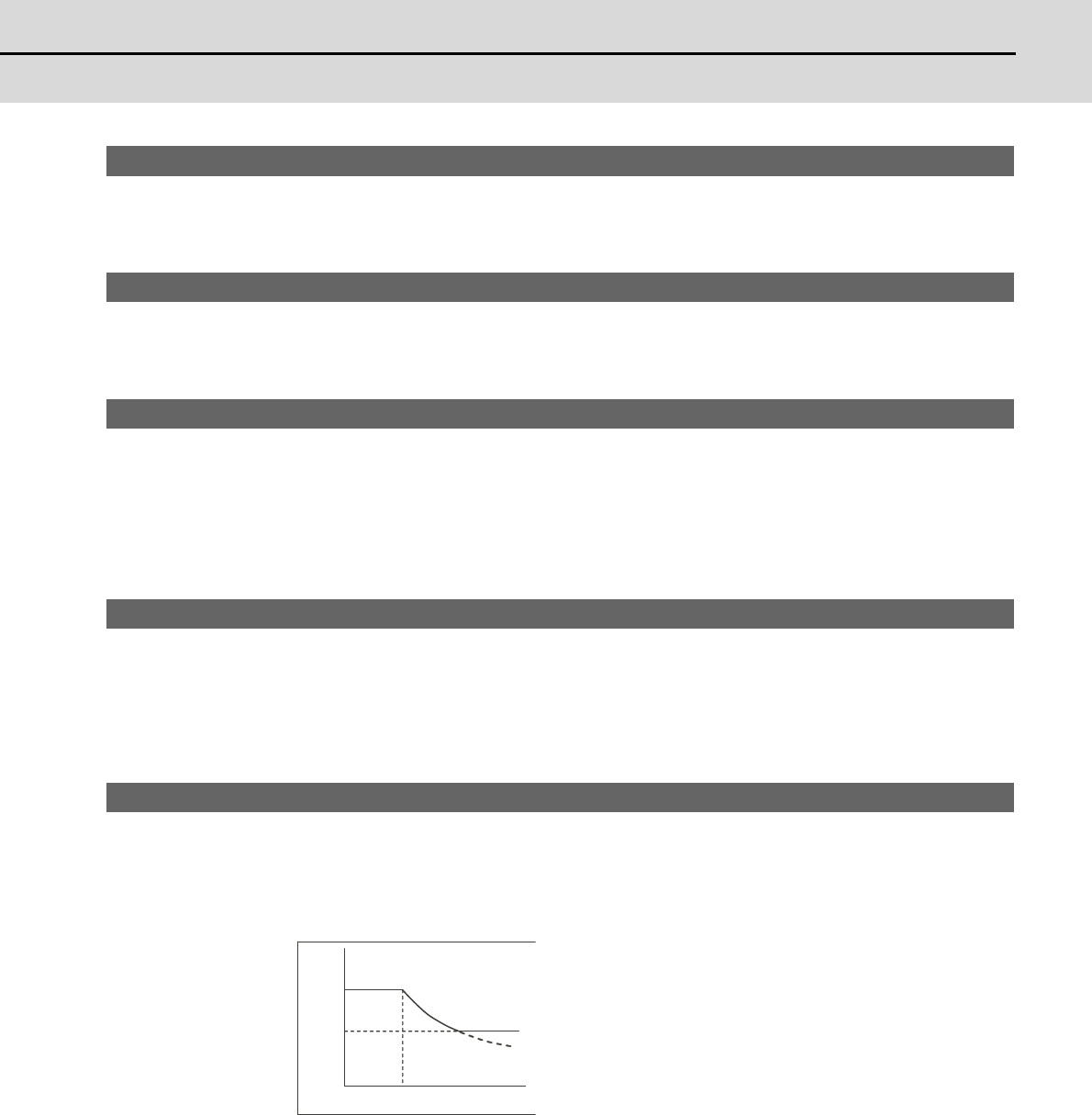
【#13071】 SP071 DIQM Variable current limit during deceleration, lower limit value
Set this parameter to adjust the deceleration time by changing the current limit value during
deceleration depending on the motor speed.
As shown below, set the lower limit rate of the current limit in SP071 (DIQM), and use with SP072
(DIQN).
When DIQM is set to 100%, the current limit value in deceleration (TMRL) set in the motor constants
is applied.
---Setting range---
0 to 999 (%)
DIQN
0
DIQM
100%
(TMLR)
Motor speed