



















104
(2) Excessive error
If accumulated pulse amount exceeds an upper limit value (values marked * in Page 103, Section 6.2.2 (1) (b)),
an excessive error occurs and the following conditions occur in the system.
• Excessive error signal (X17): ON
• Analog output voltage: 0V
• Accumulated pulses: Reset to 0
• Servo ON signal (SVON): OFF
To reset an excessive error, turn off and on PLC READY signal (Y2D).
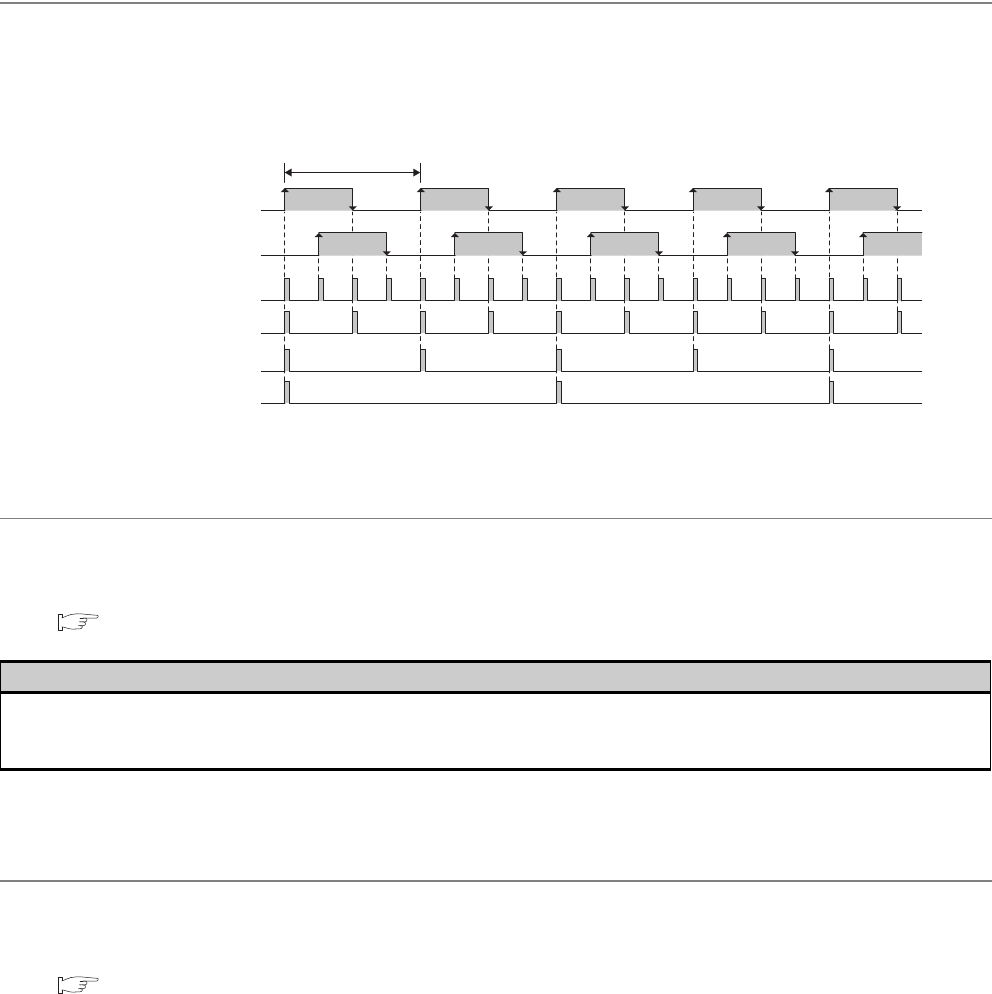
6.2.3 Multiplication setting
Set the multiplication rate of feedback pulses from the pulse generator (PLG).
This setting multiplies the feedback pulse count by 4, 2, 1, or 1/2. Use this setting to change movement amount per
pulse by 1/4, 1/2, 1, or 2.
6.2.4 OPR direction setting
Set the direction in which OPR is executed.
For OPR control, refer to the following.
Page 178, CHAPTER 8
6.2.5 OPR method setting
Select an OPR method.
For OPR control, refer to the following.
Page 178, CHAPTER 8
Important
OPR (Original Point Return) is controlled by two kinds of data: OPR direction and OPR speed. Deceleration starts when the near-point dog
turns on. If an incorrect OPR direction is set, motion control may continue without deceleration. To prevent machine damage caused by
this, configure an interlock circuit external to the programmable controller.
Phase-A feedback pulse
(PULSE A)
Phase-B feedback pulse
(PULSE B)
Times 4
Times 2
Times 1
Times 1/2
Maximum 1Mpulse/s
Multiplication
setting