



















233
CHAPTER 12 STOPPING AND RESTARTING CONTROL
12
12.1 Stopping Control
(b) Stop during deceleration of major positioning control or JOG operation
If an error (a cause of a stop) occurs during deceleration of major positioning control or JOG operation, the
deceleration continues and the operation stops since it is toward completion of the positioning or is following a
change (from on to off) of a JOG start signal (Y24, Y25). In case of major positioning control, Positioning
complete signal (X15) turns on at its completion.
This process is the same for a stop with an error.
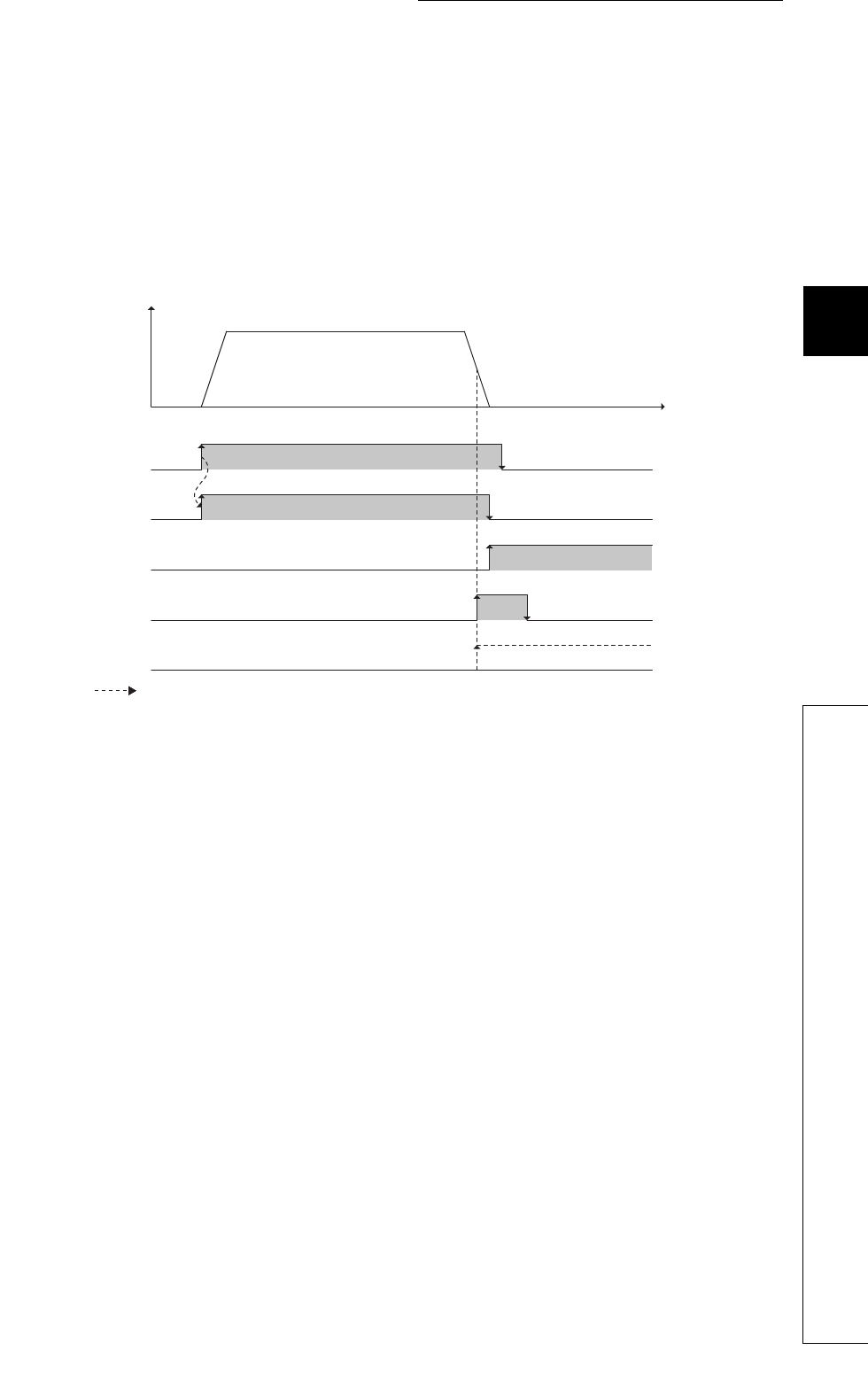
The following figure is the timing chart of when Stop signal (Y27) is turned on during deceleration of positioning
control.
*1 Error detection signal (X18) does not turn on in case of a stop following a change (from off to on) of Stop signal (Y27) or
an input of Stop signal (STOP). Error detection signal (X18) turns on due to the following.
• Servo READY signal (READY) turned off.
• PLC READY signal (Y2D) was turned off.
• Upper limit signal (FLS) turned off.
• Lower limit signal (RLS) turned off.
Executed by the QD73A1
OFF
ON
ON
t
v
OFF
ON
OFF
OFF
OFF
ON
Positioning start signal
(Y21 to Y23)
BUSY signal
(X14)
Positioning complete signal
(X15)
Stop signal
(Y27)
Error detection signal
(X18)
*1