



















67
CHAPTER 4 SETTINGS AND PROCEDURE BEFORE OPERATION
4
4.6 Wiring
4.6.2 Precautions when connecting an encoder
For details on "Rotation direction setting" in the switch setting, refer to the following.
Page 101, Section 6.2.1
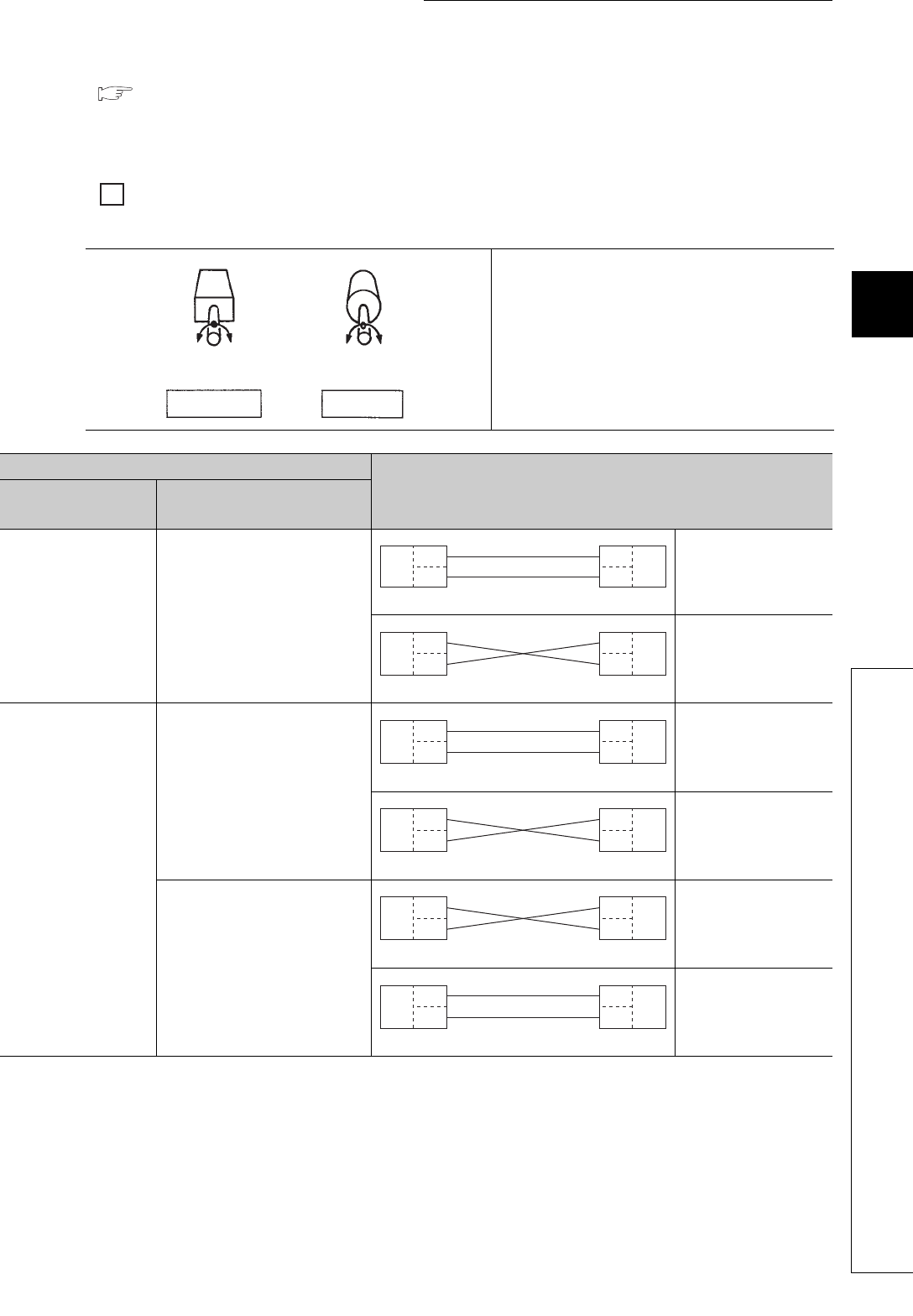
The connection between the QD73A1 and the encoder varies depending on "Rotation direction setting" and
"Feed back pulse addition/subtraction setting" of the switch setting.
Ex.
When the rotation directions of the motor and encoder are as below and the motor rotates forward when
positive voltage is applied to the servo amplifier
Suppose the condition of the feedback pulses from the
encoder as: the phase A is ahead of the phase B by 90°
in case of forward run.
Switch setting
Connection
Rotation direction
setting
Feed back pulse
addition/subtraction setting
0: Positive voltage is
output when the
positioning
address increases.
-
When the rotation
directions of the motor
and the encoder are the
same
When the rotation
directions of the motor
and the encoder are
different
1: Negative voltage is
output when the
positioning
address increases.
0: Add when the phase A
proceeds 90 degrees than
phase B.
When the rotation
directions of the motor
and the encoder are the
same
When the rotation
directions of the motor
and the encoder are
different
1: Subtract when the phase A
proceeds 90 degrees than
phase B.
When the rotation
directions of the motor
and the encoder are the
same
When the rotation
directions of the motor
and the encoder are
different
Forward
run
Reverse
run
Forward
run
Reverse
run
Servomotor Encoder
Phase
A
Phase
B
Phase
A
Phase
B
EncoderQD73A1
Phase
A
Phase
B
Phase
A
Phase
B
EncoderQD73A1
Phase
A
Phase
B
Phase
A
Phase
B
EncoderQD73A1
Phase
A
Phase
B
Phase
A
Phase
B
EncoderQD73A1
Phase
A
Phase
B
Phase
A
Phase
B
EncoderQD73A1
Phase
A
Phase
B
Phase
A
Phase
B
EncoderQD73A1