


















278
Appendix 5 Terms
(1) Encoder
One of the pulse generators that converts input data into binary data (on and off)
(2) Near-point dog
A switch used in positioning systems, which is placed before the original point of a workpiece. When this switch
turns on, the feedrate is switched to creep speed. Therefore, there is time required for the deceleration from the
federate to the creep speed while this switch is on.
(3) Servo on
A signal that indicates the normal status of a servo amplifier. A servo amplifier is operable only when it is normal
and this signal is on.
(4) Servomotor
A motor that rotates according to a command. This motor is highly responsive, therefore frequent and rapid start
and stop are available with high precision. DC and AC type motors are available as well as high power motors.
Feedback control is available with the included pulse generator that detects the number of rotations.
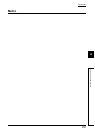
(5) Accumulated pulse
Pulses that are accumulated in the deviation counter inside the QD73A1. The difference between command
pulses and feedback pulses becomes accumulated pulses.
Accumulated pulses that are proportional to the command pulse frequency are constantly output while the
QD73A1 is operating. The number of accumulated pulses becomes "0" when positioning is completed.
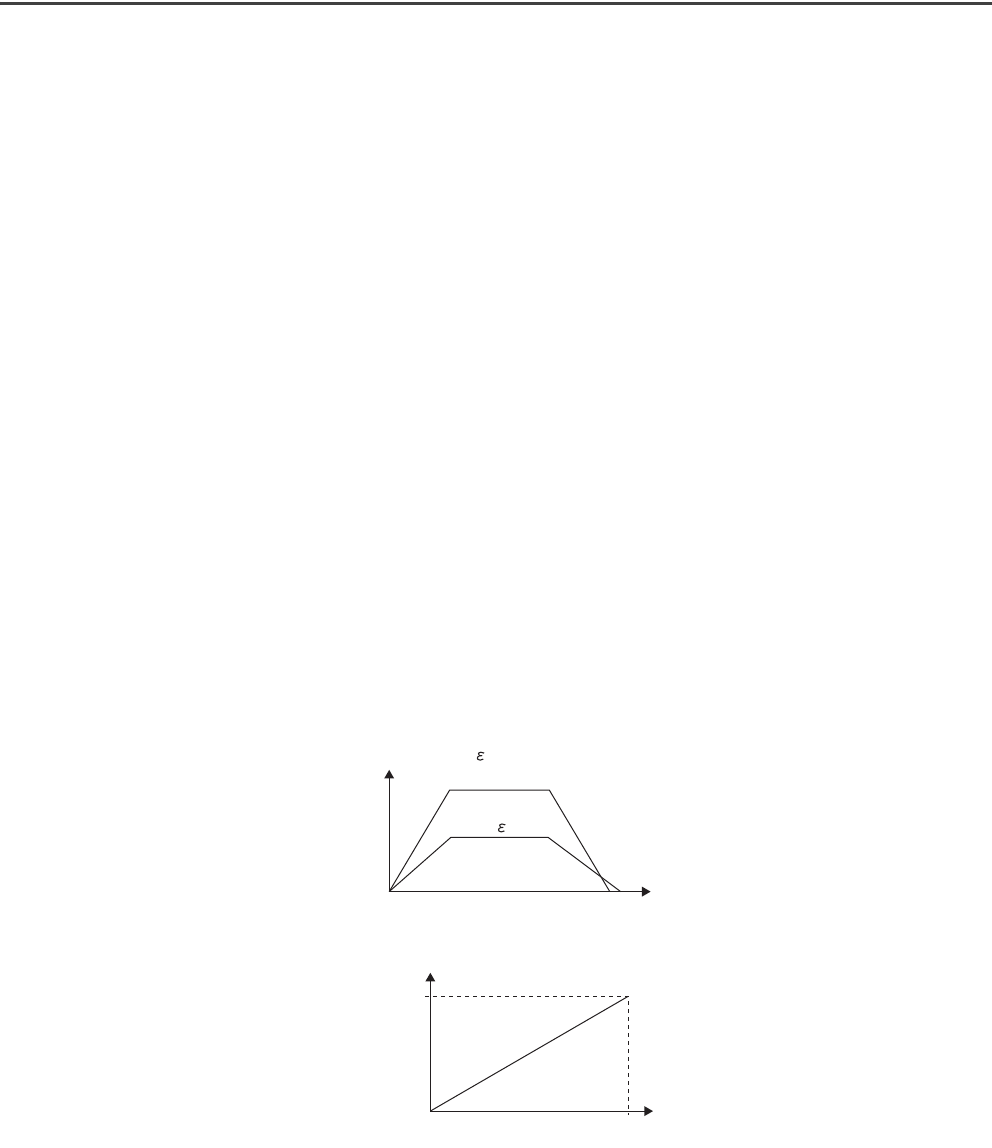
The analog output voltage value from the QD73A1 is proportional to the number of accumulated pulses.
Command pulse frequency f
Accumulated pulses
f
t
Gain value
(5 to 10V)
0
Accumulated pulses