



















25
CHAPTER 3 SPECIFICATIONS
3
3.1 Performance Specifications
CHAPTER 3 SPECIFICATIONS
This chapter describes performance specifications, I/O signals from/to the CPU module, and buffer memory
specifications of the QD73A1.
For general specifications of the QD73A1, refer to the following.
QCPU User's Manual (Hardware Design, Maintenance and Inspection)
3.1 Performance Specifications
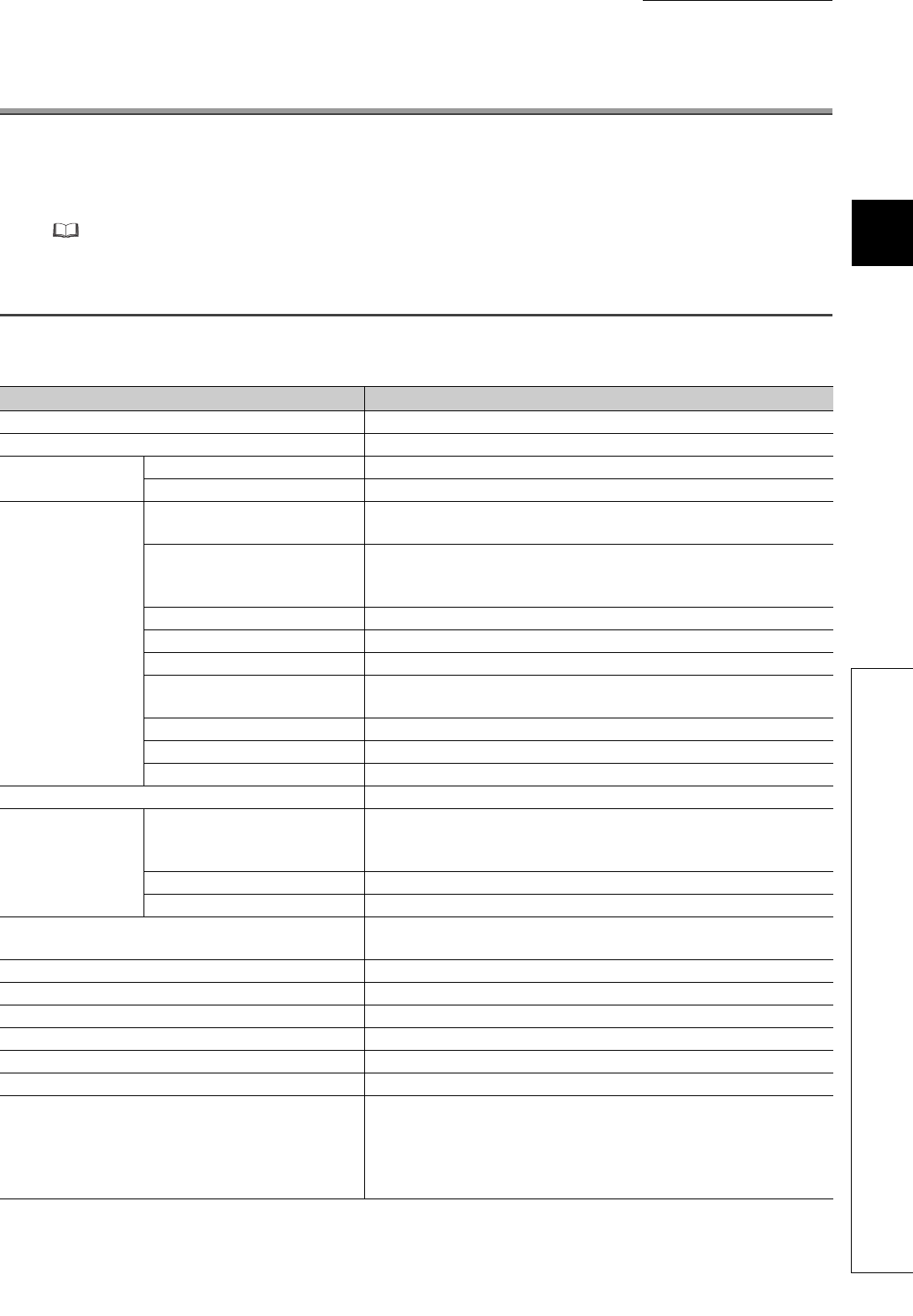
The following table lists performance specifications of the QD73A1.
Item Specifications
Number of occupied I/O points 48 points (I/O assignment: empty 16 points and intelligent 32 points)
Number of control axes 1 axis
Positioning data
Capacity 1 data
Setting method Sequence program
Positioning
Mode
Position control mode
Speed-position control switch mode
System
Position control mode: Selectable from absolute system or incremental
system
Speed-position control switch mode: Incremental system
Position command -2147483648 to 2147483647 (pulse) (signed 32-bit binary)
Speed command 1 to 4000000 (pulse/s)
Acceleration Automatic trapezoidal acceleration/deceleration
Automatic
acceleration/deceleration time
Acceleration time: 2 to 9999 (ms)
Deceleration time: 2 to 9999 (ms)
In-position range 1 to 20479 (pulse)
Backlash compensation None
Error correction function None
Speed command output 0 to ±10VDC (Adjustable to set in the range of ±5 to ±10VDC)
Positioning feedback
pulse input
Pulse frequency
Open collector: 200kpulse/s
TTL: 200kpulse/s
Differential output: 1Mpulse/s
Connectable encoder type Open collector, TTL, or differential output
Multiplication setting The number of input feedback pulses can be multiplied by 4, 2, 1, or 1/2.
OPR control
With OP address change
An OPR method and OPR direction can be set with the switch setting.
JOG operation JOG operation can be started by inputting a JOG start signal.
M function None
Internal current consumption (5VDC) 0.52A
External supply voltage/current terminal block No external power supply
External dimensions 98(H)mm × 55.2(W)mm × 90(D)mm
Weight 0.20kg
Starting time
(from a start request to analog output start)
Absolute system: 1.2ms (same for two-phase trapezoidal positioning)
Incremental system: 1.2ms (same for two-phase trapezoidal positioning)
JOG operation: 1.2ms
OPR (near-point dog method): 1.2ms
OPR (count method): 1.2ms