



















83
CHAPTER 5 DATA USED FOR POSITIONING
5
5.4 Positioning Data
(2) Positioning address P1
Set the address that is the destination of major positioning control. The setting range depends on the type of
major positioning control.
If the specified positioning address is outside the stroke range, the error "Positioning address Outside the setting
range" (error code: 30) occurs, and the positioning does not start.
(a) Absolute system
When the absolute system is selected, set an absolute address (movement amount from the OP).
To execute two-phase trapezoidal positioning control in the absolute system, the positioning direction from
" Positioning address P1" to " Positioning address P2" and the positioning direction from the
current value to " Positioning address P1" must be the same.
If not, the error "Two-phase trapezoidal positioning address error" (error code: 31) occurs, and the two-phase
trapezoidal positioning control does not start.
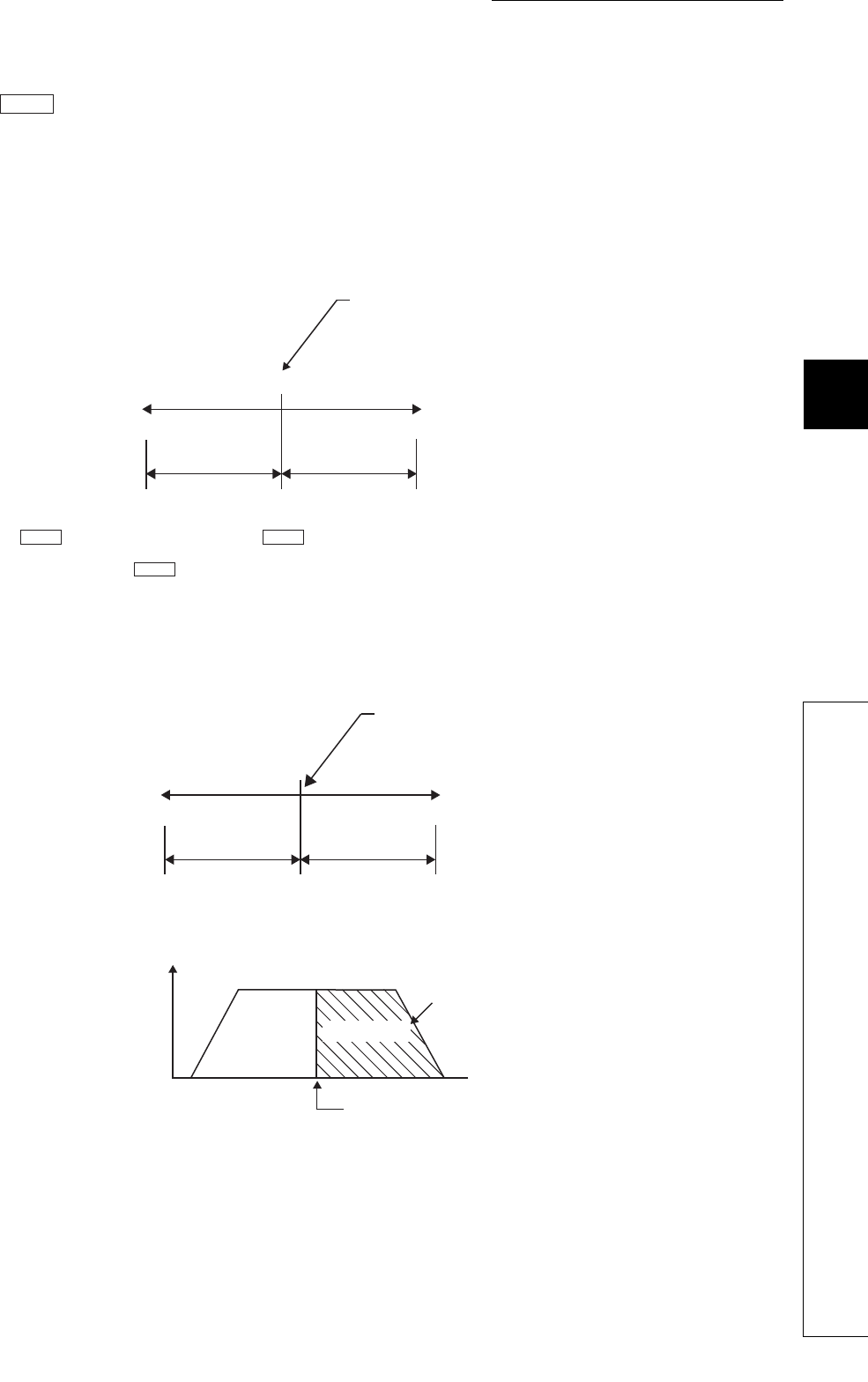
(b) Incremental system
When the incremental system is selected, set movement amount from the current value.
(c) Speed-position control switch mode
Set movement amount of after the shift from speed control to position control.
Da.2
-1000 3000
Stop position
(positioning start address)
Movement amount: 2000 Movement amount: 2000
1000
Da.2
Da.4
Da.2
Stop position
(positioning start address)
Moving in negative
direction
Moving in positive
direction
-30000 30000
(Movement amount) (Movement amount)
Speed control
v
t
Movement amount
setting
Speed-position switching
command
Position control