


















114
7.2 Programs for Positioning
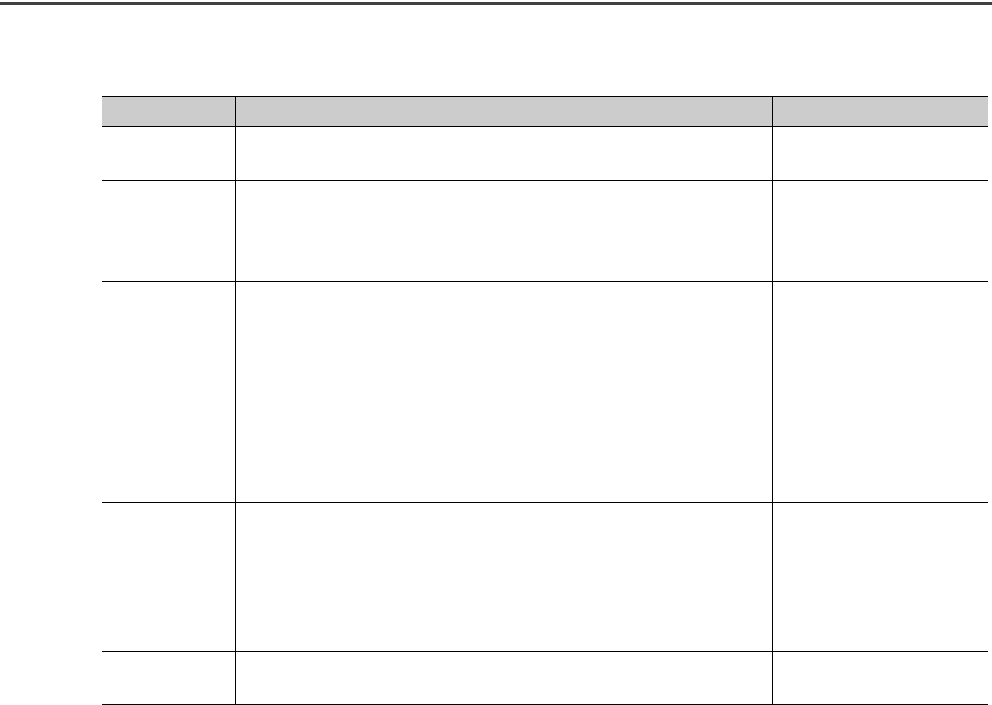
Follow the procedure below when creating programs that execute positioning using the QD73A1.
Procedure Program Reference
1
Parameter setting
Create a program for parameter setting.
Page 117, Section 7.3.1
Page 149, Section 7.4.1
2
OPR
Create a program for one of the following.
• Near-point dog method
• Count method
Page 119, Section 7.3.2
Page 151, Section 7.4.2
3
Start program
Create programs for the following depending on the control to be
executed.
• Positioning control
• Two-phase trapezoidal positioning control
• Speed-position control switch mode
• Speed control operation
• Fixed-feed operation
• JOG operation
Page 125, Section 7.3.3
Page 133, Section 7.3.4
Page 135, Section 7.3.5
Page 157, Section 7.4.3
Page 167, Section 7.4.4
Page 170, Section 7.4.5
4
Sub program
Create programs for the following depending on the control to be
executed.
• Current value change
• Speed change
• Deviation counter clear
Page 137, Section 7.3.6
Page 172, Section 7.4.6
5
Stop program
Create a program for stopping control.
Page 141, Section 7.3.7
Page 177, Section 7.4.7