



















197
CHAPTER 9 MAJOR POSITIONING CONTROL
9
9.6 Details of Major Positioning Control
9.6.2 Speed-position control switch mode
Input Speed-position switching command signal (CHANGE) at the area where the speed is stable (constant speed status).
When a servomotor is used, the actual movement amount after the switchover to position control is "Set movement amount
+ Accumulated pulse amount". If the signal is input during acceleration or deceleration, the operation stop position varies
due to the variation in the accumulated pulse amount.
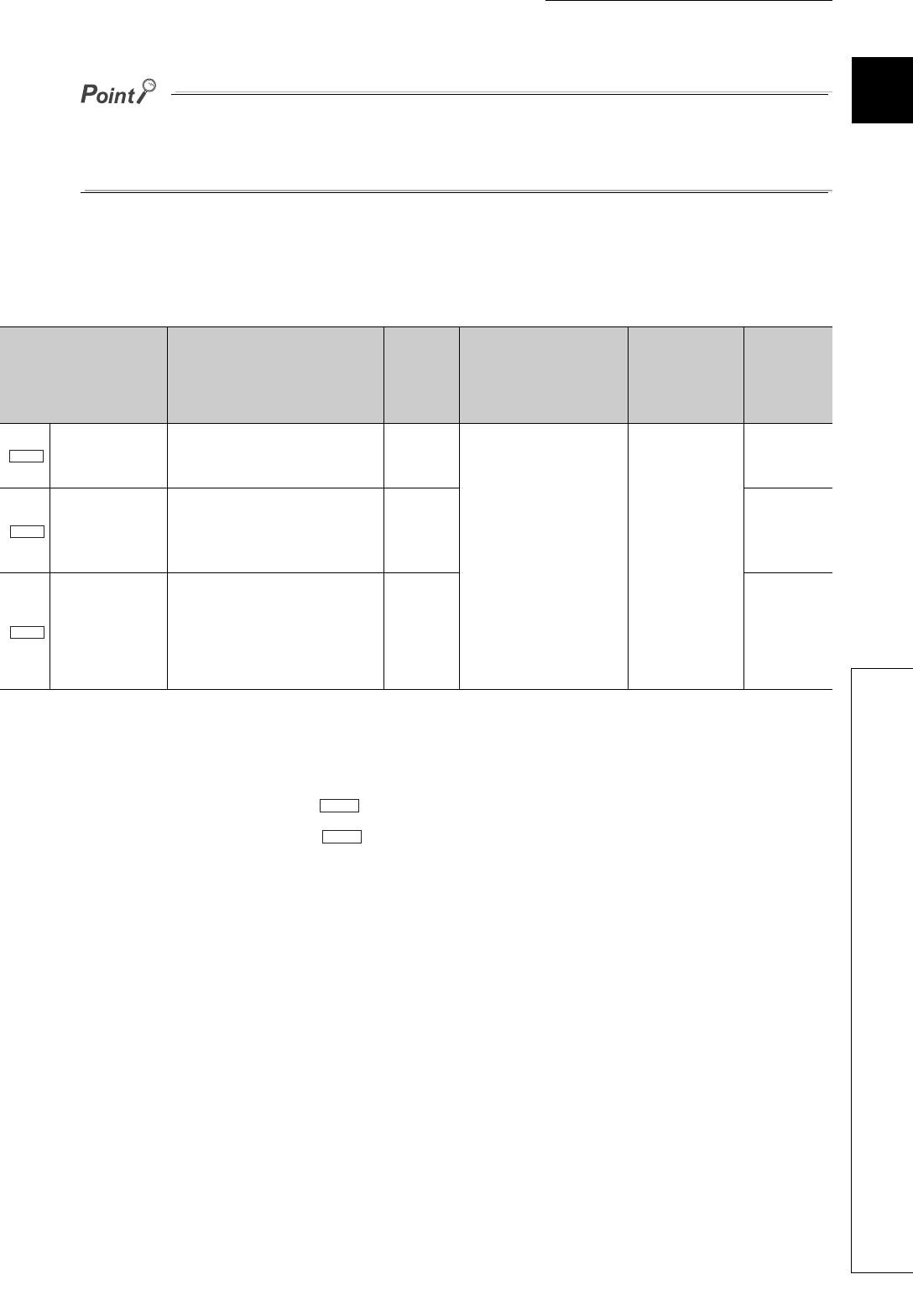
(7) Parameter and positioning data setting
The following table lists the parameter and positioning data to be set, setting condition, and check timing.
Set other parameters if necessary.
(8) Speed-position movement amount change
The movement amount for position control can be changed during speed control of the speed-position control
switch mode.
Set the new movement amount in " New speed-position movement amount" using a sequence program
during speed control. The value in " New speed-position movement amount" is reflected as the movement
amount for position control at the input of Speed-position switching command signal (CHANGE).
Setting item Setting range
Default
value
Setting condition
Check timing
of the set data
Buffer
memory
address
(decimal)
Positioning mode
0: Position control mode
1: Speed-position control switch
mode
0
The data can be set
anytime.
Note that the set data at
the rise (ON) of a
positioning start signal
(Y22, Y23) are used for
the operation. If the data
are written when BUSY
signal (X14) is on, the
data will be accepted at
the rise (ON) of the next
positioning start signal
(Y22, Y23).
When a
positioning start
signal (Y22, Y23)
is turned on
25
Positioning
address P1
(movement
amount)
0 to 2147483647pulse 0pulse
302
303
Positioning
speed V1
1 to 4000000pulse/s 0pulse/s
304
305
Pr.9
Da.2
Da.3
Cd.6
Cd.6