



















185
CHAPTER 9 MAJOR POSITIONING CONTROL
9
9.1 Overview of Major Positioning Control
CHAPTER 9 MAJOR POSITIONING CONTROL
"Major positioning control" is executed using "variable parameters" and "positioning data" stored in the QD73A1. The
position control mode or the speed-position control switch mode is executed by setting a variable parameter
" Positioning mode" and a positioning data item " Positioning pattern" and by starting the positioning data.
9.1 Overview of Major Positioning Control
The following types of "major positioning control" are executed when a positioning start signal (Y21 to Y23) is turned
on.
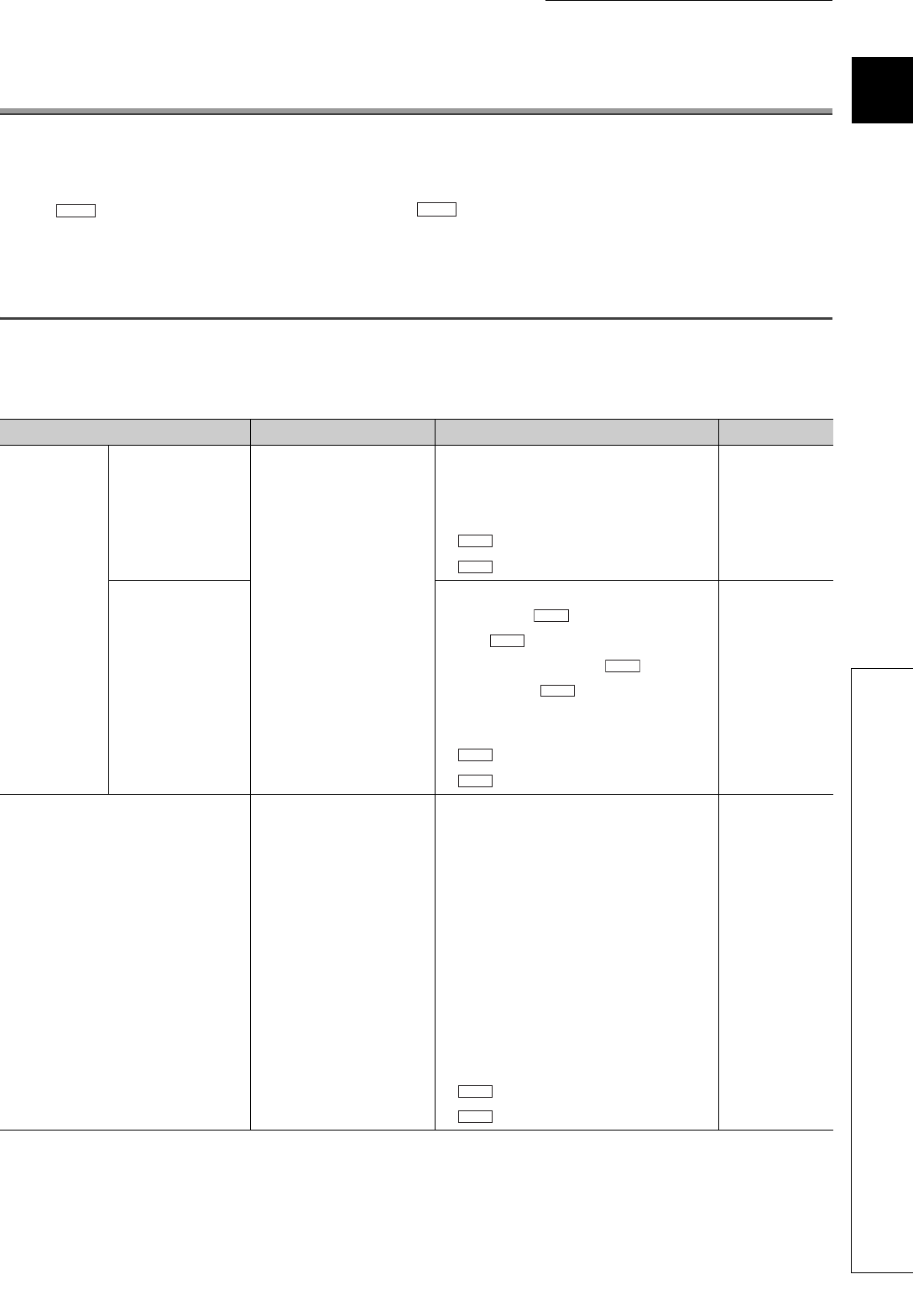
Major positioning control Start signal Description Reference
Position control
mode
Positioning control
• Absolute positioning start
signal (Y21)
• Forward start signal (Y22)
(incremental positioning)
• Reverse start signal (Y23)
(incremental positioning)
Positioning is executed from the current
position to a specified position at a specified
speed.
[Buffer memory setting]
• Positioning mode: 0
• Positioning pattern: 0
Page 191,
Section 9.6.1 (1)
Two-phase
trapezoidal
positioning control
Positioning is executed to the address
specified with " Positioning address
P1" at " Positioning speed V1", then to
the address specified with " Positioning
address P2" at " Positioning speed V2"
by one positioning start signal.
[Buffer memory setting]
• Positioning mode: 0
• Positioning pattern: 1
Page 192,
Section 9.6.1 (2)
Speed-position control switch mode
• Forward start signal (Y22)
(Speed-position control
switchover)
• Reverse start signal (Y23)
(Speed-position control
switchover)
Operation starts according to the positioning
speed set beforehand by one positioning start
signal, then the operation switches to position
control by Speed-position switching
command signal (CHANGE).
If the operation stopped by Stop signal after
the input of Speed-position switching
command signal (CHANGE), the positioning
can be continued by requesting a restart.
In addition, the positioning address
(movement amount) can be changed if it is
before the input of Speed-position switching
command signal (CHANGE).
[Buffer memory setting]
• Positioning mode: 1
• Positioning pattern: 0
Page 195,
Section 9.6.2
Pr.9
Da.1
Pr.9
Da.1
Da.2
Da.3
Da.4
Da.5
Pr.9
Da.1
Pr.9
Da.1