



















196
(3) " Current feed value" and " Actual current value"
In " Current feed value" and " Actual current value", 0 is set at the start of the speed-position control
switch mode, and the settings are not updated during speed control.
They are updated once the operation switched to position control by the input of Speed-position switching
command signal (CHANGE).
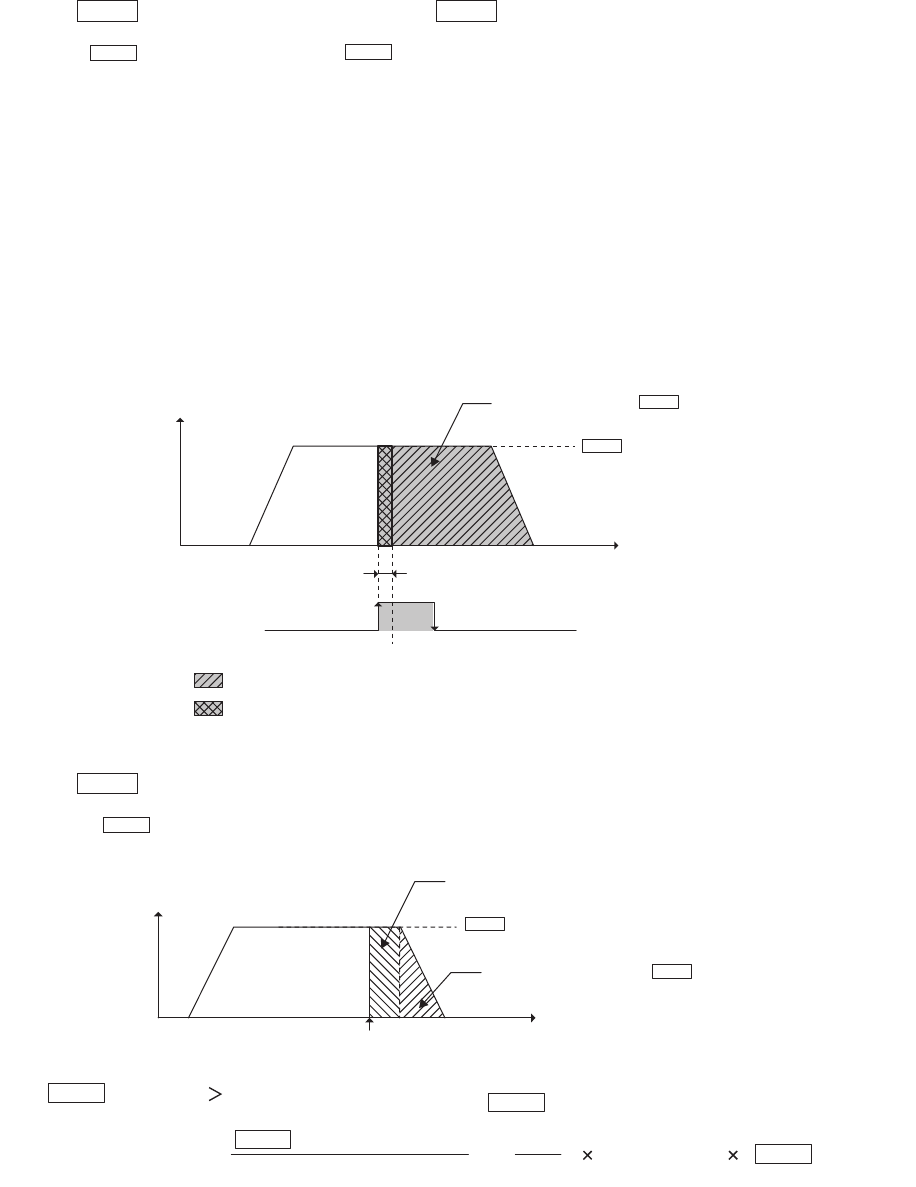
(4) Positioning error in the speed-position control switch mode
In the speed-position control switch mode, operation switches to position control by an input of Speed-position
switching command signal (CHANGE) during speed control. The process from the signal input to the completion
of switchover to position control takes some time, resulting in a positioning error by pulses output during the
process.
The process time varies by approximately 2ms including the response delay of Speed-position switching
command signal (CHANGE).
(5) " Positioning address P1"
Set " Positioning address P1" so that its setting value becomes greater than the value of the distance
obtained using the following formula. If not, the positioning stops exceeding the specified movement amount.
(6) Two-phase trapezoidal positioning control and speed-position control
switchover
A speed-position control switchover cannot be performed in two-phase trapezoidal positioning control.
Md.1
Md.2
Md.1
Md.2
Set movement amount
t
v
Time takes to switch control
Switched to position control
Speed-position switching
command signal (CHANGE)
Positioning error
Movement amount set to " Positioning address P1"
Da.2
Positioning speed V1
Da.3
ON
OFF
Da.2
Da.2
v
t
+
=+
2
1
Actual
deceleration time
Accumulated pulses at the switching command
Speed-position switching command
(Accumulated pulses at the
switching command)
Position loop gain
Positioning speed V1
Da.3
Positioning speed V1
Da.3
Positioning
address P1
Da.2
Positioning
speed V1
Da.3
(Distance to decelerate from
Positioning speed V1)
Da.3
Distance to decelerate from " Positioning speed V1"
Da.3