



















192
(b) Positioning data setting
The following table lists the positioning data to be set, setting condition, and check timing.
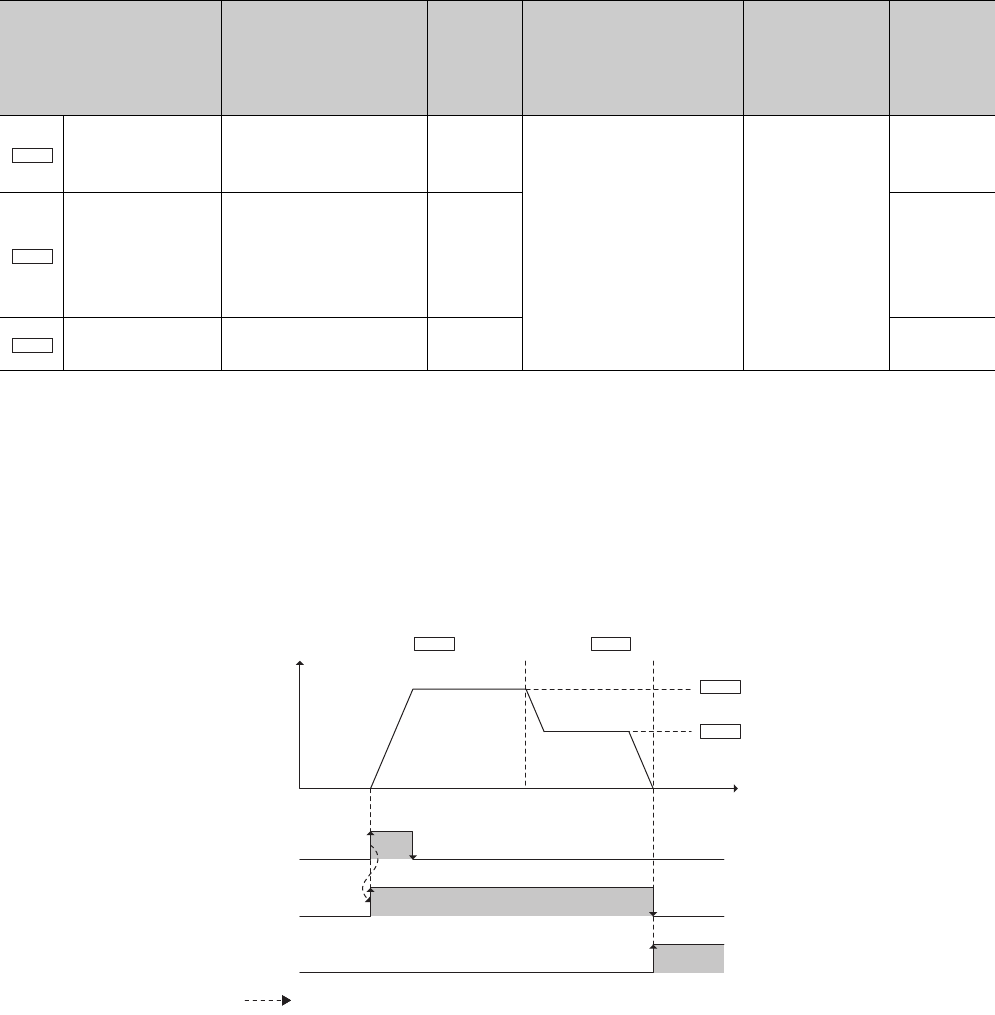
(2) Two-phase trapezoidal positioning control
Set positioning addresses (P1 and P2) and positioning speed (V1 and V2) for this type of control. Positioning of
the absolute system or the incremental system is executed first to the positioning address P1 at the positioning
speed V1, then to the positioning address P2 at the positioning speed V2 by one positioning start command.
(a) Operation of two-phase trapezoidal positioning control
The operation is as follows.
Setting item Setting range
Default
value
Setting condition
Check timing
of the set data
Buffer
memory
address
(decimal)
Positioning pattern
0: Positioning control
1: Two-phase trapezoidal
positioning control
0
The data can be set anytime.
Note that the set data at the
rise (ON) of a positioning
start signal (Y21 to Y23) are
used for the operation. If the
data are written when BUSY
signal (X14) is on, the data
will be accepted at the rise
(ON) of the next positioning
start signal (Y21 to Y23).
When a
positioning start
signal (Y21 to
Y23) is turned on
301
Positioning address
P1 (movement
amount for the
incremental
system)
Absolute system:
-2147483648 to
2147483647pulse
Incremental system:
0 to 2147483647pulse
0pulse
302
303
Positioning speed
V1
1 to 4000000pulse/s 0pulse/s
304
305
Da.1
Da.2
Da.3
Executed by the QD73A1
t
v
OFF
OFF
OFF
ON
ON
ON
Positioning start signal
(Y21 to Y23)
BUSY signal
(X14)
Positioning complete signal
(X15)
Positioning address P1
Da.2
Positioning address P2
Da.4
Positioning speed V1
Da.3
Positioning speed V2
Da.5