

















269
APPENDICES
A
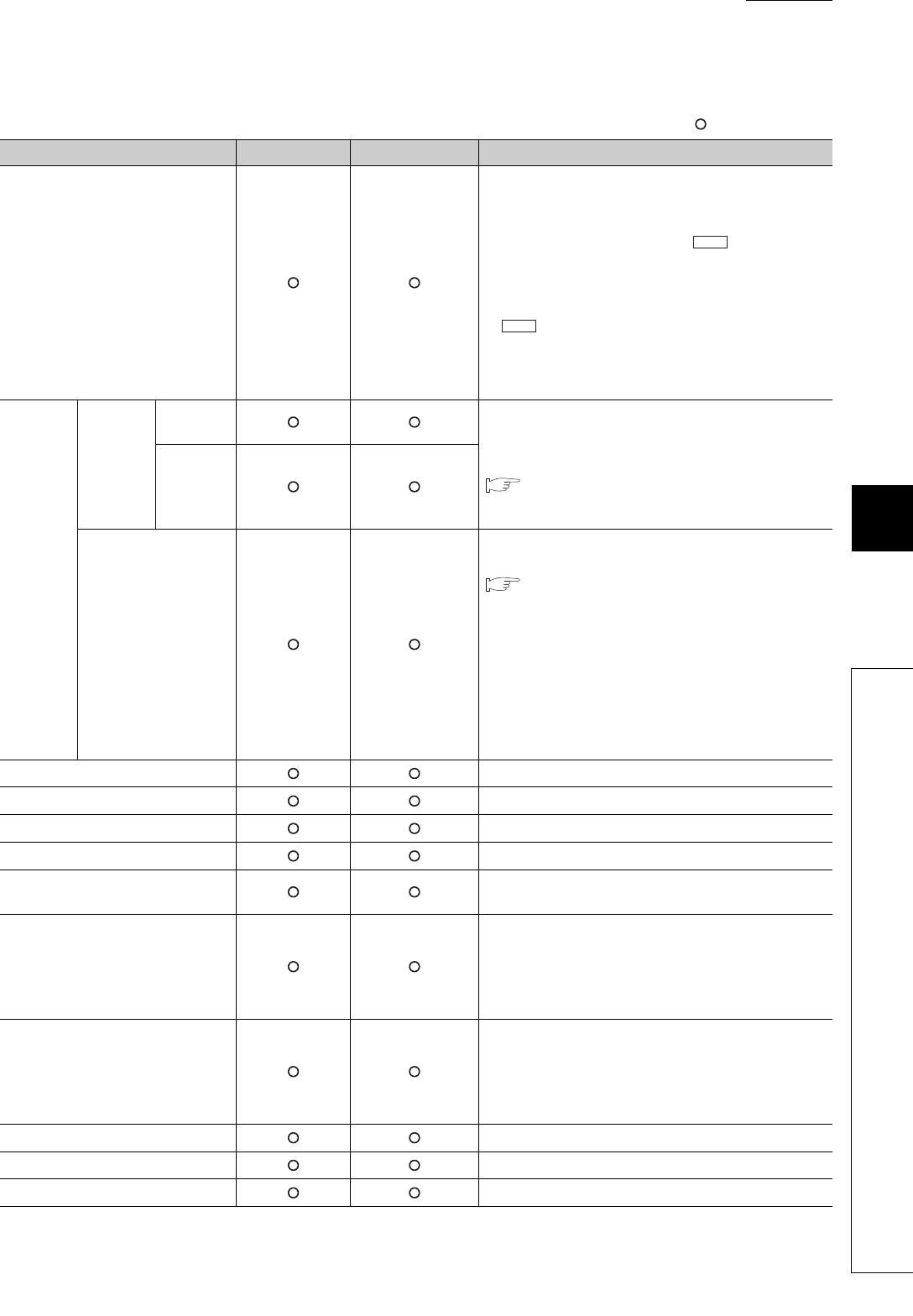
Appendix 3 Comparison of the QD73A1 and the AD70/A1SD70
(2) Function comparison
: Usable ×: Unusable
Function QD73A1 AD70/A1SD70 Difference
OPR control
[Movement amount after near-point dog ON (buffer
memory)]
• QD73A1: The movement amount where the OPR
direction is reflected is stored in Movement
amount after near-point dog ON, which is the same
buffer memory address as the AD70/A1SD70. The
absolute value of movement amount is stored in
Movement amount after near-point dog ON
(absolute value)
• AD70/A1SD70: The absolute value of movement
amount is stored.
Major
positioning
control
Position
control
mode
Positioning
control
[Buffer memory addresses for positioning data]
Refer to the following.
Page 273, Appendix 3 (5)
Two-phase
trapezoidal
positioning
control
Speed-position control
switch mode
[Buffer memory addresses for positioning data]
Refer to the following.
Page 273, Appendix 3 (5)
[New speed-position movement amount (buffer memory)]
• QD73A1: The setting is cleared to 0 when the next
operation starts.
• AD70/A1SD70: The value written during speed control
is reflected.
[Stroke limit range]
• QD73A1: 1 to 2147483647
• AD70/A1SD70: Stroke limit lower limit to upper limit
JOG operation
Electronic gear function
Speed limit function
Stroke limit function
Upper limit switch (FLS)/lower limit
switch (RLS) function
Current value change function
[Procedure]
• QD73A1: The current value can be changed by setting
"1" in "Current value change request".
• AD70/A1SD70: The current value can be changed by
writing a new current value in the buffer memory.
Speed change function
[Procedure]
• QD73A1: Speed can be changed by setting "1" in
"Speed change request".
• AD70/A1SD70: Speed can be changed by writing a
new speed value in the buffer memory.
Deviation counter clear function
In-position function
Multiplication setting
Md.6
Md.22