



















17
CHAPTER 1 OVERVIEW
1
CHAPTER 1 OVERVIEW
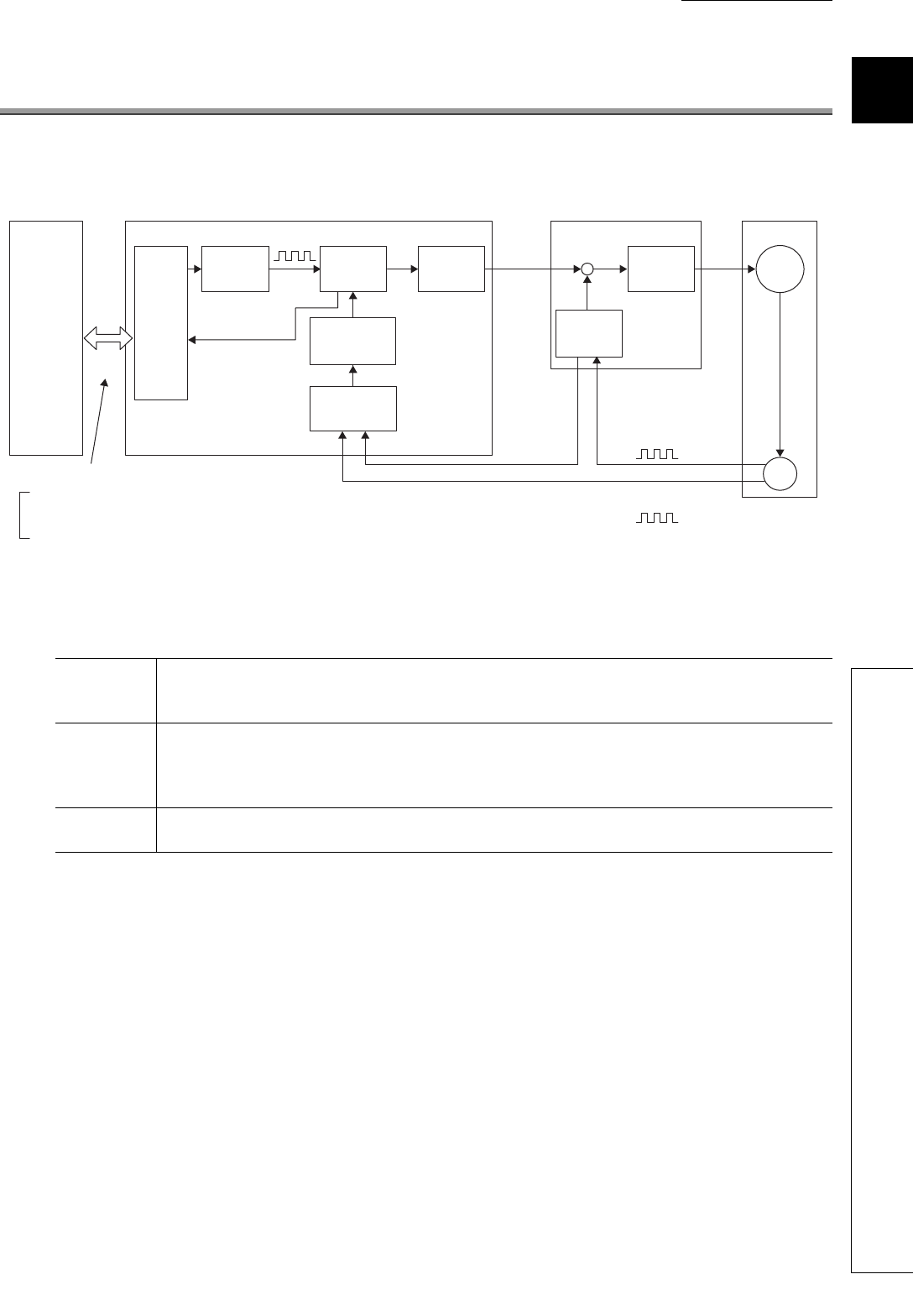
The QD73A1 possesses a deviation counter and D/A converter inside as in the following figure.
A system with the QD73A1 operates as follows.
The rotation speed of a servomotor is proportional to command pulse frequency, while the rotation degree of the
servomotor is proportional to the output command pulse amount. By setting feed per pulse beforehand, analog voltage
that is proportional to the number of pulses in a pulse train is output, and a workpiece can be moved to the set position.
Note that pulse frequency defines the rotation speed of the servomotor (feedrate).
Start
Once a command pulse train for positioning is output, pulses are accumulated in the deviation counter. The
integrated value of pulses (accumulated pulses) is converted into DC analog voltage by a D/A converter, then
turns into a speed command to a servomotor. The speed command from a drive unit starts servomotor rotation.
Operation
Once the servomotor starts rotating, feedback pulses that are proportional to the number of rotations are
generated by a pulse generator (PLG) attached to the servomotor. The generated feedback pulses are
subtracted from the accumulated pulses in the deviation counter. The deviation counter continues to rotate the
servomotor, maintaining a constant amount of accumulated pulse.
Stop
Once the command pulse output from the QD73A1 stops, the accumulated pulses in the deviation counter
decrease, so does the speed. When there is no more accumulated pulse, the servomotor stops.
Electronic
gear
Deviation
counter
D/A
converter
Multiplication
Servo
amplifier
Setting
data
Sequence
program
Command
pulses
Interface
CPU module
Parameter data
Positioning data
OPR parameters
Data writing/reading
Positioning module QD73A1
Analog
voltage
Speed
command
Drive unit Servomotor
Feedback pulses
Feedback pulses
*1
*2
M
PLG
*1
Current
value
Feedback pulses from the pulse generator (PLG) may be input to the QD73A1
via the drive unit
*1
or directly
*2
depending on the servomotor to be used.
Check which method applies in the manual for the servomotor or drive unit to
be used.
Feedback pulse
addition/
subtraction setting