



















78
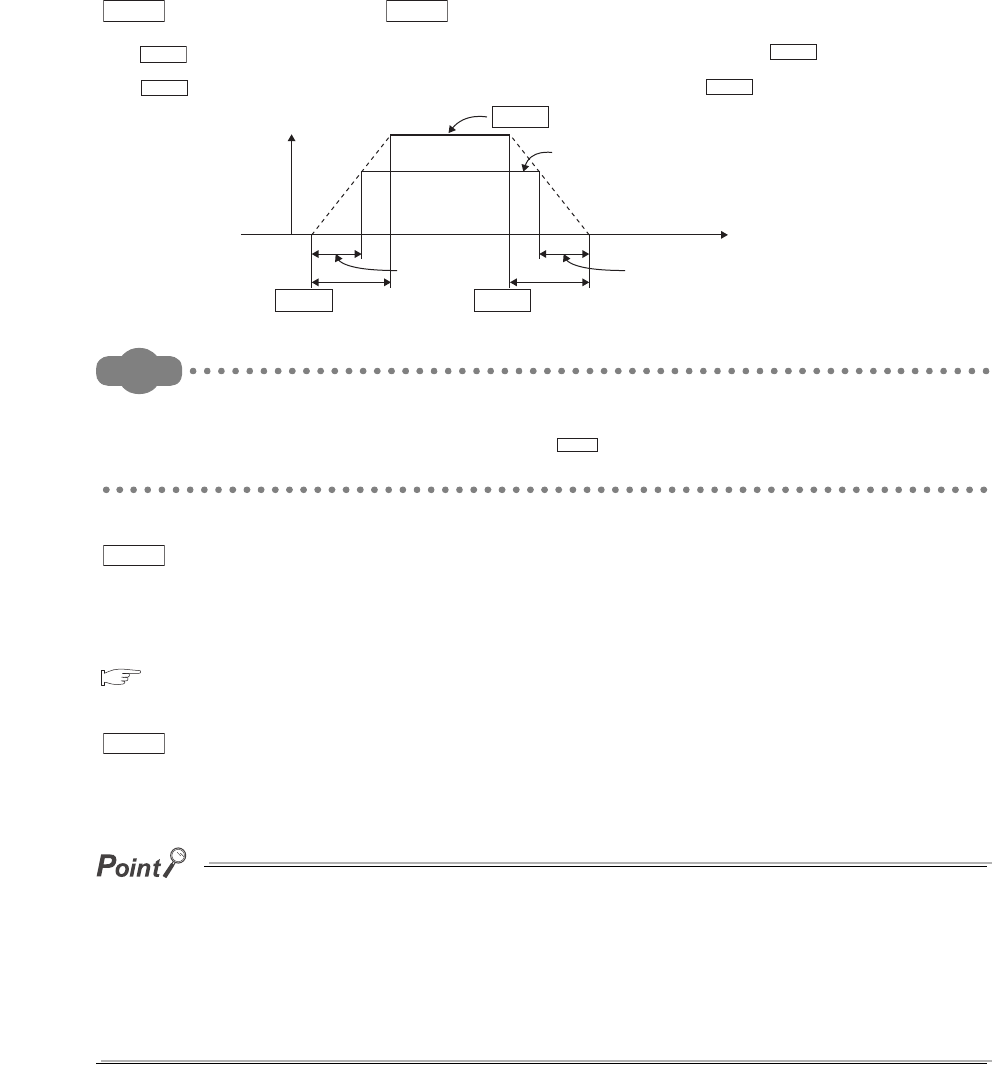
(4) Acceleration time, Deceleration time
• Acceleration time: Set the time takes for speed (0) to reach the value in " Speed limit value".
• Deceleration time: Set the time takes for the speed (the value in " Speed limit value") to reach 0.
Remark
● The parameters are active for OPR control, major positioning control, and JOG operation.
● When the set positioning speed is lower than the value in " Speed limit value", the actual acceleration/deceleration
time is shorter than the set value of the parameters.
(5) In-position range
Set the accumulated pulse amount where In-position signal (X16) turns on.
In-position signal (X16) can be used as the signal right before Positioning complete signal (X15).
For details on the in-position function, refer to the following.
Page 221, Section 11.8
(6) Positioning mode
Select a control mode of major positioning from the position control mode or the speed-position control switch
mode.
If a value other than 0 and 1 is set, the error "Positioning mode Outside the setting range" (error code: 14) occurs.
Although, the QD73A1 checks the setting range only for the start by Forward start signal (Y22) or Reverse start signal
(Y23). For the start by the following signals, the above error does not occur even if the set value is outside the setting
range.
• OPR start signal (Y20)
• Absolute positioning start signal (Y21)
• Forward JOG start signal (Y24)
• Reverse JOG start signal (Y25)
Pr.6
Pr.7
Pr.6
Pr.5
Pr.7
Pr.5
Actual
acceleration
time
Actual
deceleration
time
t
v
Speed limit value
Positioning speed
Acceleration time Deceleration time
Pr.7Pr.6
Pr.5
Pr.5
Pr.8
Pr.9