


















148
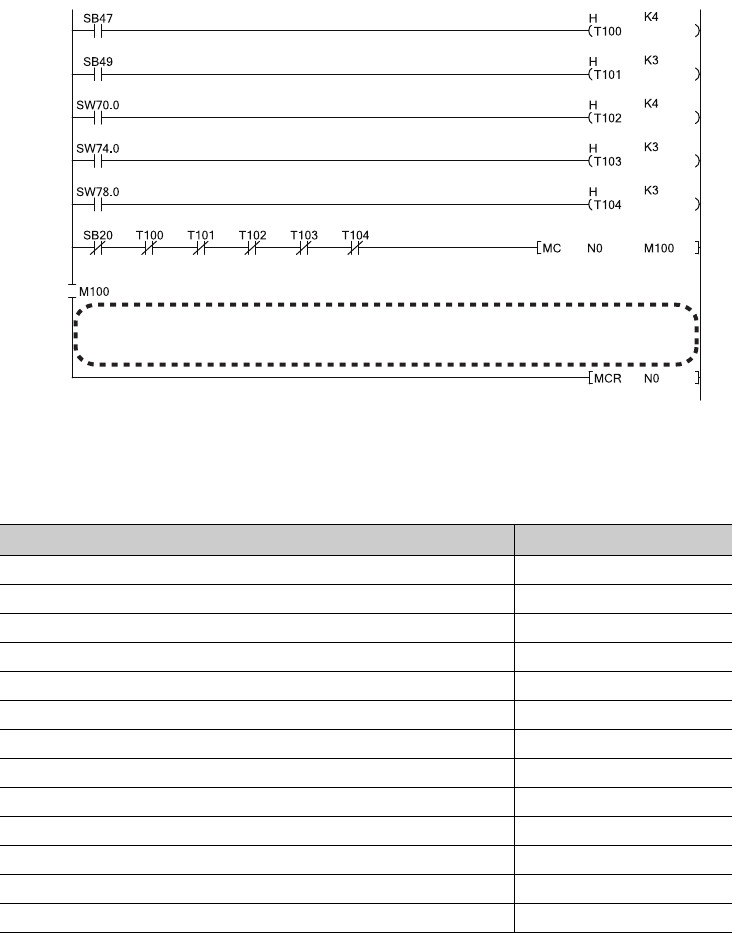
(6) Interlock program of MELSECNET/H remote I/O network
For programs introduced in Page 149, Section 7.4.1 to Page 177, Section 7.4.7, make interlocks using data link
status of the own station and the other station as shown below.
(7) Program example
Refer to the following.
Program example Reference
Parameter setting program Page 149, Section 7.4.1
Near-point dog method OPR program Page 151, Section 7.4.2 (1)
Count method OPR program Page 154, Section 7.4.2 (2)
Positioning control program Page 157, Section 7.4.3 (1)
Two-phase trapezoidal positioning control program Page 159, Section 7.4.3 (2)
Speed-position control switch mode program Page 161, Section 7.4.3 (3)
Speed control operation program Page 164, Section 7.4.3 (4)
Fixed-feed operation program Page 167, Section 7.4.4
JOG operation program Page 170, Section 7.4.5
Current value change program Page 172, Section 7.4.6 (1)
Speed change program Page 174, Section 7.4.6 (2)
Deviation counter clearing program Page 176, Section 7.4.6 (3)
Stop program during positioning Page 177, Section 7.4.7
Programs described in
Page 149, Section 7.4.1, Page 177, Section 7.4.7