



















27
CHAPTER 3 SPECIFICATIONS
3
3.3 List of Functions
3.3 List of Functions
This section introduces the functions of the QD73A1.
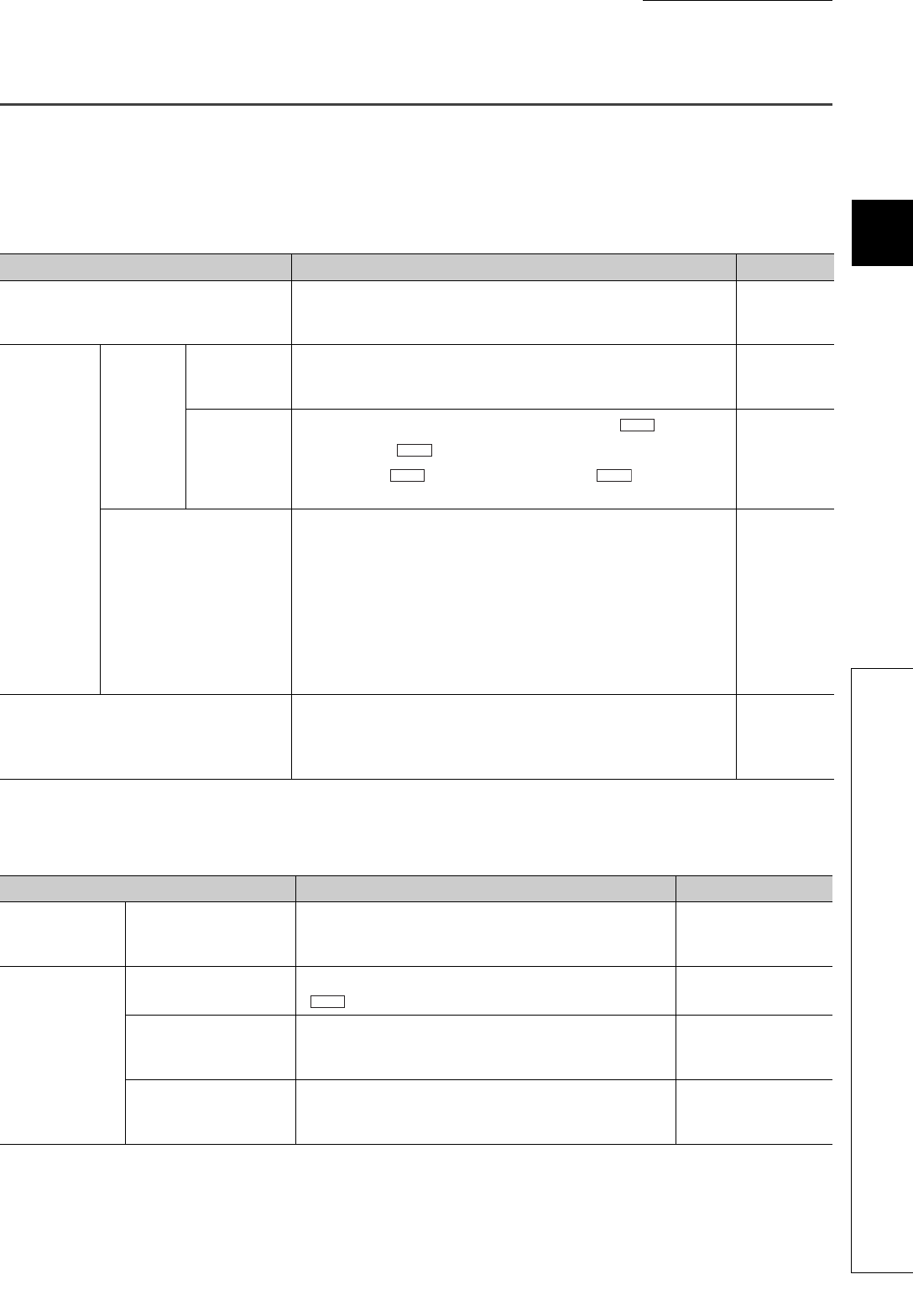
(1) Main functions
Major positioning functions are as follows.
(2) Sub functions
Sub functions compensate or limit control, or add functions at the execution of major positioning functions.
Item Description Reference
OPR control
A workpiece is returned to an original point following an OPR start
command, and the current value is corrected as an OP address after the
completion of OPR.
Page 178,
CHAPTER 8
Major
positioning
control
Position
control
mode
Positioning
control
Positioning is executed from the current position to a specified position at
a specified speed.
Page 191,
Section 9.6.1
(1)
Two-phase
trapezoidal
positioning
control
Positioning is executed to the address specified with " Positioning
address P1" at " Positioning speed V1", then to the address
specified with " Positioning address P2" at " Positioning
speed V2" by one positioning start signal.
Page 192,
Section 9.6.1
(2)
Speed-position control switch
mode
Operation starts according to the positioning speed set beforehand by
one positioning start signal, then the operation switches to position
control by Speed-position switching command signal (CHANGE).
If the operation stopped by Stop signal after the input of Speed-position
switching command signal (CHANGE), the positioning can be continued
by requesting a restart.
In addition, the positioning address (movement amount) can be changed
if it is before the input of Speed-position switching command signal
(CHANGE).
Page 195,
Section 9.6.2
JOG operation
Positioning is executed in the specified direction at specified speed while
a JOG operation command is on. Turning on the signal starts operation
at a specified speed and speed control operation can be continued until a
stop signal is input.
Page 200,
CHAPTER 10
Item Description Reference
Functions to
compensate
control
Electronic gear function
This function controls moving distance and speed by
multiplying command pulse output of the QD73A1.
Page 209, Section 11.1
Functions to limit
control
Speed limit function
This function limits command speed to the value set in
" Speed limit value".
Page 211, Section 11.2
Stroke limit function
This function controls operation not to execute positioning
when a command that moves the workpiece outside the
specified stroke limit range is given.
Page 213, Section 11.3
Upper limit switch
(FLS)/lower limit switch
(RLS) function
This function decelerates and stops operation according to the
detection on limit switches placed at the upper and lower
stroke limits.
Page 215, Section 11.4
Da.2
Da.3
Da.4
Da.5
Pr.5