



















232
(3) Stop during major positioning control or JOG operation
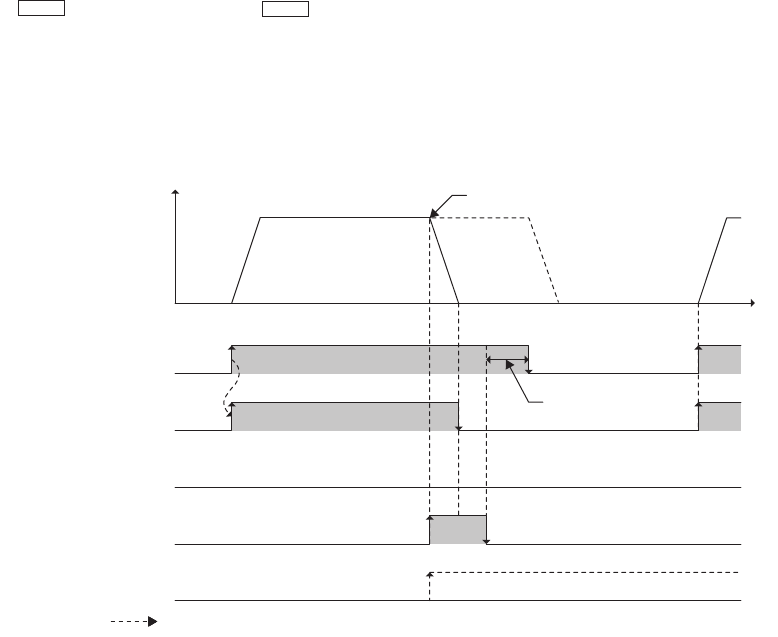
(a) Stop before deceleration start of major positioning control or JOG operation
If an error (a cause of a stop) occurs prior to a start of deceleration during major positioning control or JOG
operation, a deceleration stop starts at the error occurrence. The deceleration speed depends on
" Deceleration time" and " Speed limit value".
Positioning complete signal (X15) does not turn on at the completion of the deceleration stop.
Also, the next positioning does not start even if the error is resolved while the start signal is on. The start signal
must be turned off and on.
The following figure is the timing chart of when Stop signal (Y27) is turned on during positioning control.
*1 Error detection signal (X18) does not turn on in case of a stop following a change (from off to on) of Stop signal (Y27) or
an input of Stop signal (STOP). Error detection signal (X18) turns on due to the following.
• Servo READY signal (READY) turned off.
• PLC READY signal (Y2D) was turned off.
• Upper limit signal (FLS) turned off.
• Lower limit signal (RLS) turned off.
Pr.7
Pr.5
Executed by the QD73A1
OFF
ON
ON
t
v
OFF
ON
OFF
OFF
Deceleration start
OFF
Positioning start signal
(Y21 to Y23)
BUSY signal
(X14)
Positioning complete signal
(X15)
Stop signal
(Y27)
Error detection signal
(X18)
*1
Does not start even if Stop
signal (Y27) is turned off