81
CHAPTER 5 DATA USED FOR POSITIONING
5
5.3 OPR Parameters
(4) Setting for the movement amount after near-point dog ON
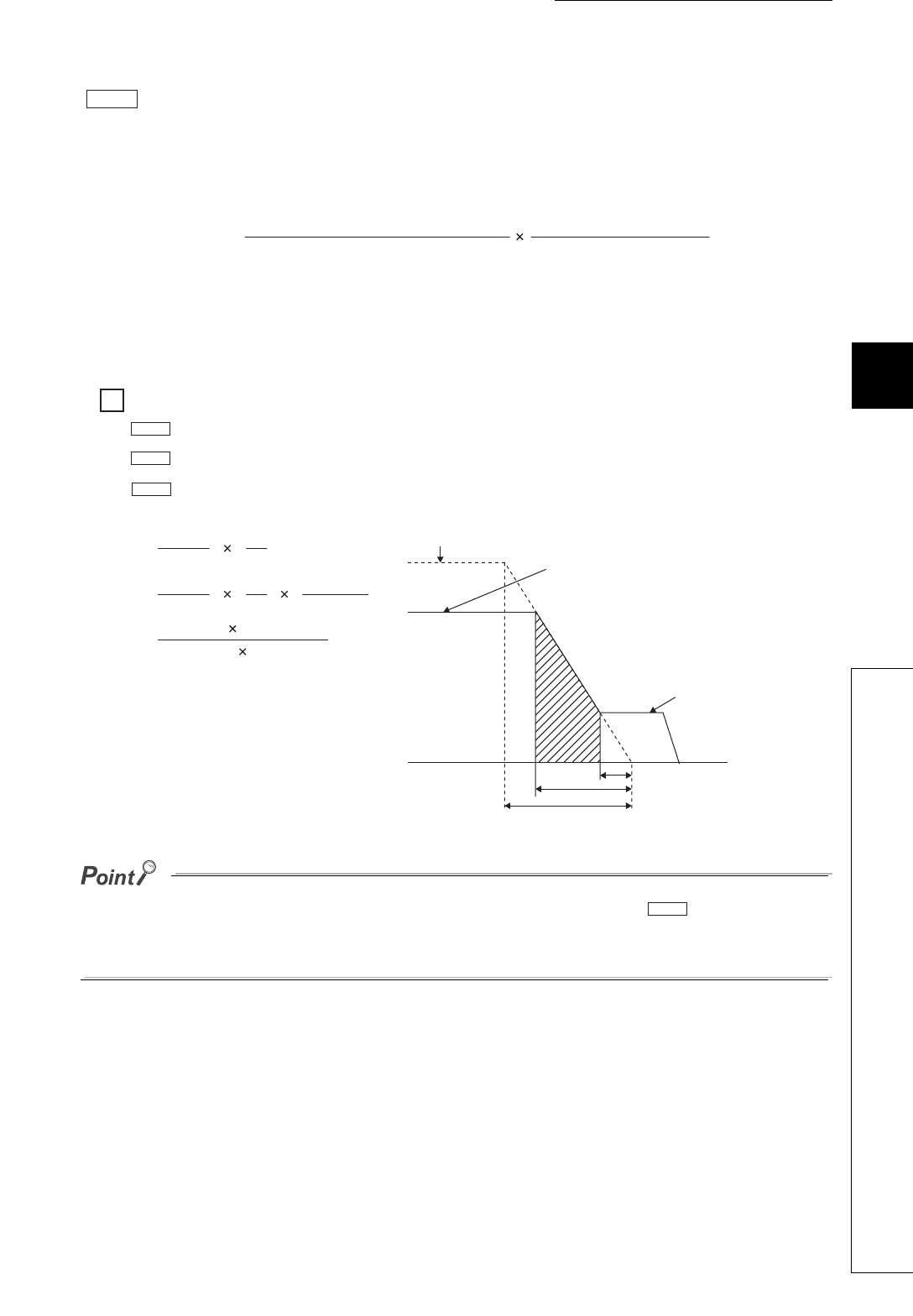
When the OPR method is the count method, set the movement amount from the position where Near-point dog
signal (X1C) turns on to the original point. Set a value equal to or greater than the deceleration distance from the
OPR speed to the creep speed.
The following are the setting precautions.
• Set pulse amount so that the position moved from the near-point dog ON does not overlap with Zero signal.
• Calculate deceleration distance without the use of electronic gear.
The following is a setting example.
When parameters are set as follows.
• OPR speed: 10kpulse/s (default value)
• Creep speed: 1kpulse/s (default value)
• Deceleration time: 300ms (default value)
When the position where the near-point dog turns on is set near the center of Zero signals, " Setting for the
movement amount after near-point dog ON" should be an integral multiple of pulses per one servomotor rotation. Then the
position moved after the near-point dog ON does not overlap with Zero signal.
For instance, when the number of pulses per one servomotor rotation is 2000, set 2000 pulses.
Pr.13
Deceleration distance
(pulse)
=
(OPR speed + Creep speed) (pulse/s)
1000
Actual deceleration time (ms)
2
Pr.11
Pr.12
Deceleration
distance
=
V
Z
+
Vc
1000
t
2
=
V
Z
+
Vc
1000
1
2
TB(VZ - Vc)
Vp
=
= 74.25
= 75 (rounded up to the nearest integer)
(10k + 1k)
300(10k - 1k)
2000
200k
VP Speed limit value 200kpulse/s
V
Z OPR speed 10kpulse/s
V
C Creep speed 1kpulse/s
T
B Deceleration time 300ms
b
a
Actual deceleration time t=a-b





































































































































































































































































































