



















181
CHAPTER 8 OPR CONTROL
8
8.3 Count Method
8.3 Count Method
This section describes the operation overview of an OPR method, "count method".
OPR in the count method can be executed also in case of the following.
• OPR on the near-point dog ON
• Another OPR after completion of OPR
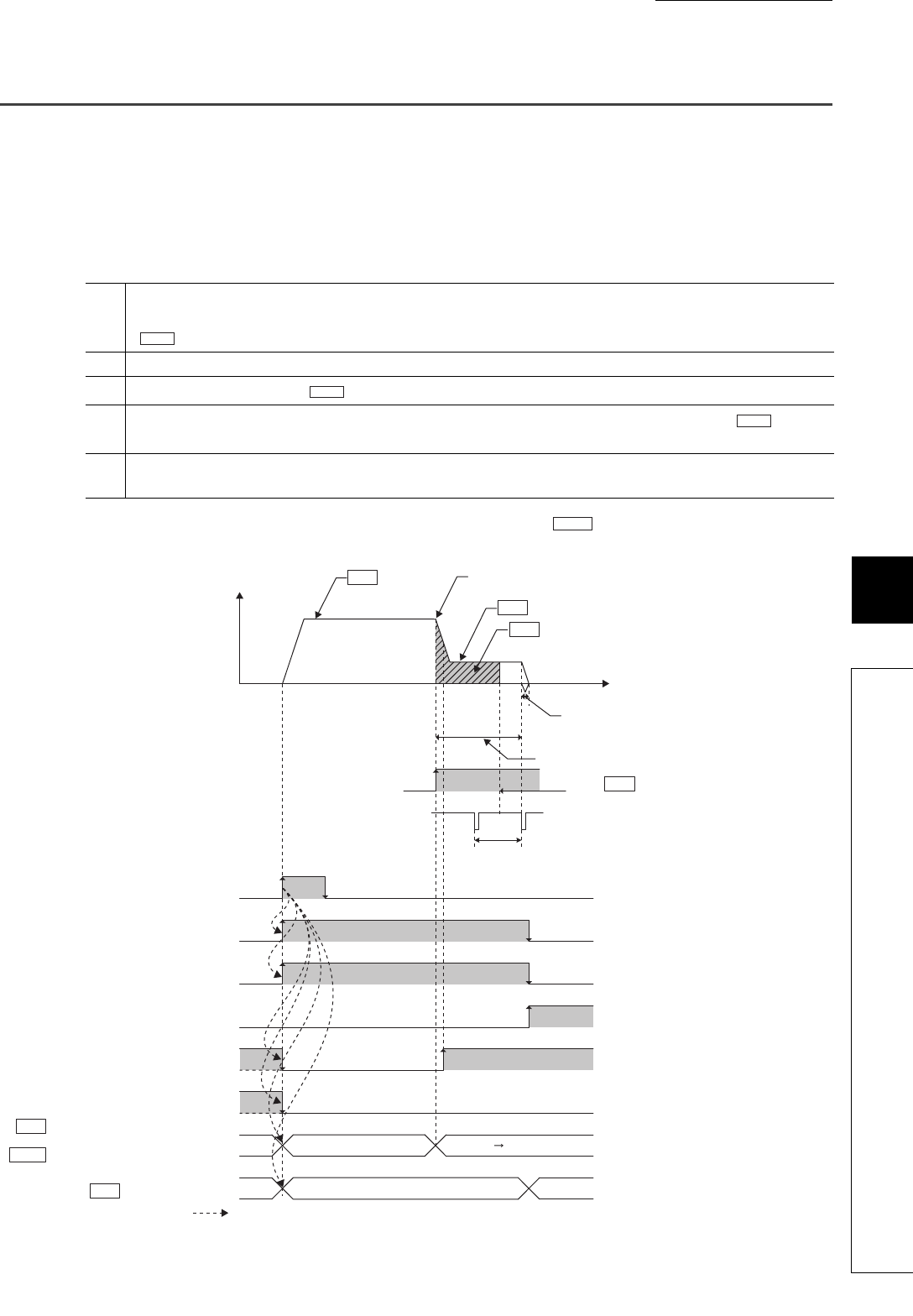
(1) Operation chart
As in the following figure, after the machine moved the amount set in " Setting for the movement amount
after near-point dog ON", the position of the first Zero signal from the pulse generator becomes the OP.
1
OPR starts.
(Acceleration starts in the direction set on "OPR direction setting" in the switch setting, and the machine moves at
" OPR speed".)
2 As the near-point dog turns on, deceleration starts.
3
The machine decelerates to " Creep speed", and subsequently moves at the creep speed.
4
Output from the QD73A1 stops at the first Zero signal after the machine moved by the amount set in " Setting
for the movement amount after near-point dog ON".
5
Returning operation is executed by the coasting amount after Zero signal input, then OPR complete signal (X13) turns
on and OPR request signal (X12) turns off.
Pr.11
Pr.12
Pr.13
Pr.13
1
v
2
3
4
5
ON
Zero signal
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
Inconsistent
0
OFF
Inconsistent
OPR start signal (Y20)
OPR request signal (X12)
BUSY signal (X14)
OPR complete signal (X13)
In-position signal (X16)
Positioning complete signal
(X15)
Md.1
Current feed value
Pr.11
OPR speed
Deceleration at the near-point dog ON
Pr.12
Creep speed
Pr.13
Setting for the movement amount after near-point dog
ON
Returning operation is executed by the coasting
amount after Zero signal input, and the OPR is
completed.
Movement amount after near-point dog ON
*1
t
Adjust Setting for the movement amount
after near-point dog ON so that it is closer to the
center of Zero signals.
If it overlaps with Zero signal, the OPR stop
position may deviate by one servomotor rotation.
One servomotor
rotation
Near-point dog
(Updated according to the movement) OP address
Pr.13
Executed by the QD73A1
0 Value of *1
Md.6
Movement amount after near-point
dog ON
Md.22
Movement amount after near-point
dog ON (absolute value)