



















188
9.4 Specifying a Positioning Address
This section describes systems to specify a position for control using positioning data.
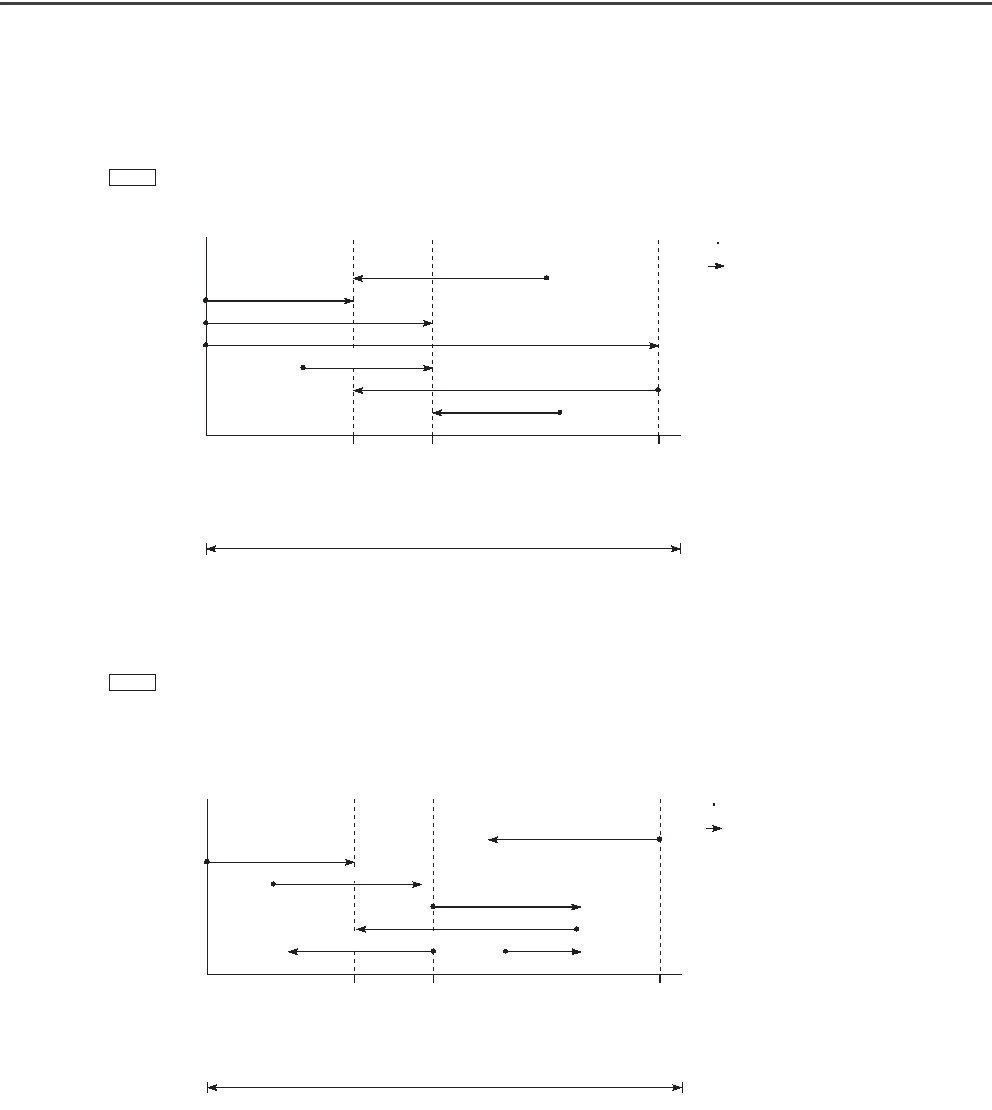
(1) Absolute system
Positioning is executed using the current address as the start address and the address set with
" Positioning address P1" as the end address.
(2) Incremental system
Positioning is executed from the current address (start address) by the movement amount set in
" Positioning address P1".
The moving direction depends on the start signal to turn on: Forward start signal (Y22) or Reverse start signal
(Y23).
Da.2
Start point
End point
Address 100
Address 100
Address
150
Address 300
Address 150
Address 100
Address 150
OP
(Reference point)
100 150 300
A point B point C point
Within the stroke limit range
Da.2
Movement
amount
-150
Start point
End point
Movement amount
+100
Movement amount +100
Movement amount
-100
Movement amount
+100
Movement amount +50
Movement amount -100
OP
(Reference point)
100
A point
150
B point
300
C point
Within the stroke limit range