



















182
(2) Precautions during operation
(a) Setting for the movement amount after near-point dog ON
If " Setting for the movement amount after near-point dog ON" is smaller than the deceleration distance
from " OPR speed" to " Creep speed", the error "Setting for the movement amount after near-point
dog ON Outside the setting range" (error code: 22) occurs, and the OPR does not start.
In addition, if the position after the move according to " Setting for the movement amount after near-point
dog ON" is close to Zero signal, the Zero signal may be misread, resulting in deviation of OP by one
servomotor rotation. Set " Setting for the movement amount after near-point dog ON" so that the position
after the move becomes closer to the center of Zero signals.
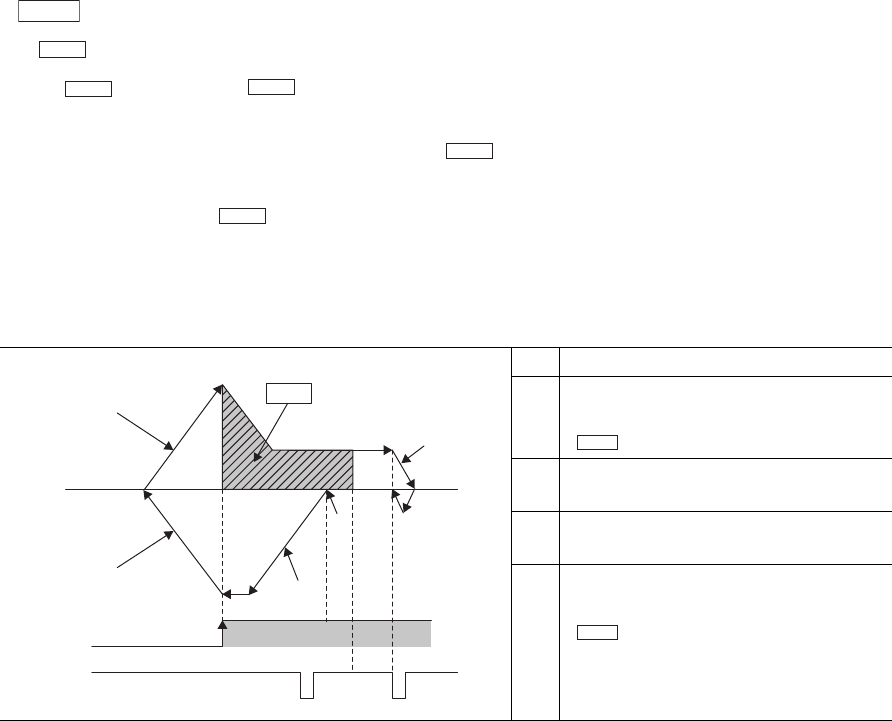
(b) OPR start while near-point dog is on
The operation is as follows.
(c) Outside the stroke limit range
If the workpiece moved outside the stroke limit range, the error "Outside the stroke limit range" (error code:
100) occurs; although, the operation continues. In this case, the OPR is completed normally if the near-point
dog is placed on the OPR direction.
1 OPR starts.
2
The workpiece moves in the direction that is
opposite from the specified OPR direction at
" OPR speed".
3
As the near-point dog turns off, deceleration
starts.
4
After an operation stop, OPR starts in the
specified OPR direction.
5
As the near-point dog turns on, the
workpiece moves the amount set in
" Setting for the movement amount
after near-point dog ON". Then, the OPR is
completed at the first Zero signal after the
move.
Pr.13
Pr.13
Pr.11
Pr.12
Pr.13
Pr.13
Zero signal
OFF
ON
3
2
4
1
5
Near-point
dog
Pr.13
Setting for the movement
amount after near-point
dog ON
Pr.11
Pr.13