



















218
11.6 Speed Change Function
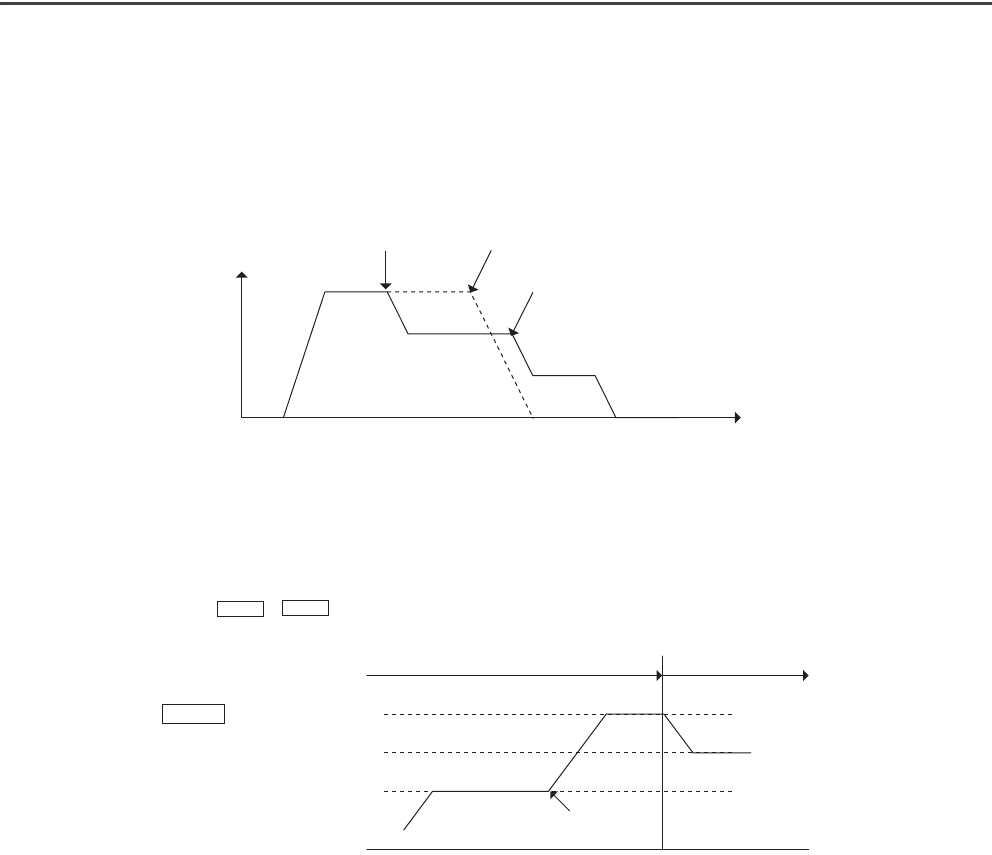
The "speed change function" changes the speed of the operation in process to a specified speed at a specified timing.
Set a new speed value to the buffer memory and request the speed change.
(1) Control detail
The following figure shows the operation of speed changes.
(2) Precautions for control
(a) Speed change during two-phase trapezoidal positioning control
• A speed change requested during two-phase trapezoidal positioning control is reflected to the command
speed ( , ) of the next positioning data.
• If the remaining distance is not enough to change speed, the speed cannot be changed during two-phase
trapezoidal positioning control.
(b) Timing at which speed cannot be changed
Speed cannot be changed at the following timings.
• During deceleration following a stop command
• During OPR
(The error "Speed change error (OPR)" (error code: 111) occurs.)
• During automatic deceleration in major positioning control
(The error "Speed change error (Positioning)" (error code: 112) occurs.)
• During deceleration stop of JOG operation following a change (from on to off) of a JOG start signal (Y24,
Y25)
(The error "Speed change error (JOG)" (error code: 113) occurs.)
v
t
Speed change to V2 Positioning in V1
Speed change to V3
V3
V2
V1
Da.3
Da.5
New speed value
Speed change command
Cd.2
Command speed of P2
Command speed of P1
Positioning control P1 Next control P2