

















5 - 23
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
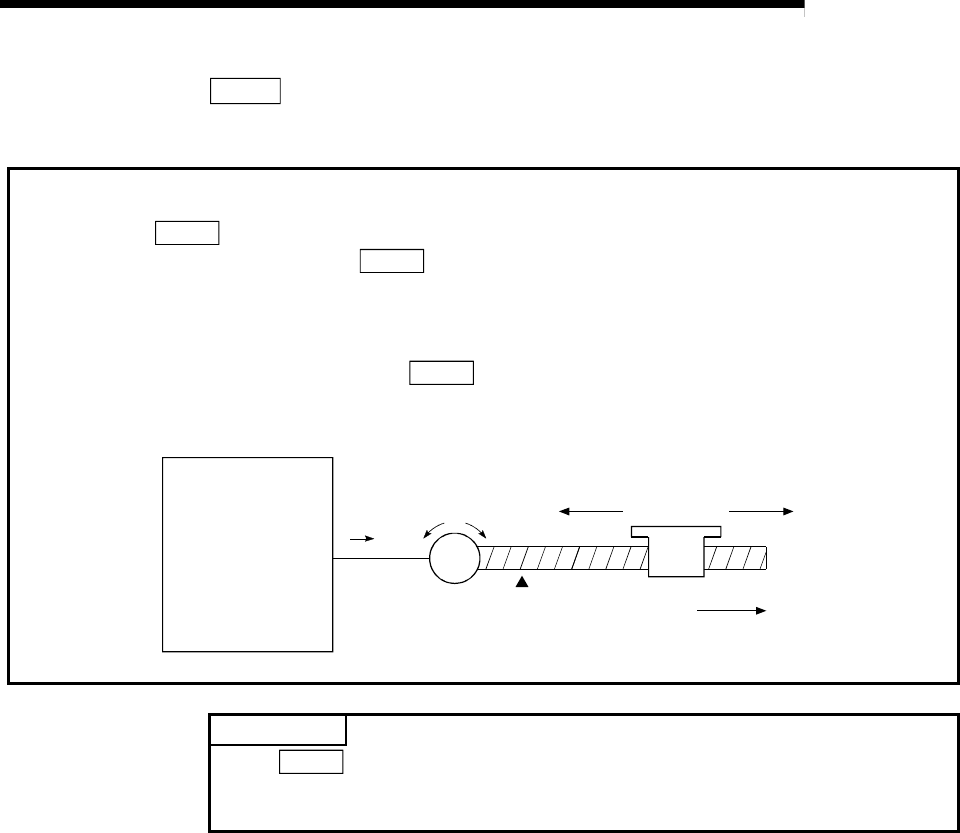
Pr.6
Rotation direction setting
Set the relation of the motor rotation direction and current value address
increment/decrement.
[Setting procedure]
1) Set "0" in
Pr.6 , and carry out forward run JOG operation.
("0" is set as the default value for
Pr.6 .)
2) When the workpiece "W" is moving toward the address increment direction defined in the system the
address increment direction, the current setting is O.K.
When the workpiece "W" is moving toward the address decrement direction defined in the system the
address decrement direction, set "1" in
Pr.6 , and change the rotative direction.
3) Carry out forward run JOG operation again, and if "W" moves toward the increment direction, the
setting is complete.
M
W
D75P2
1) Forward run pulse
Motor
Address decre-
ment direction
Address incre
-
ment direction
2) Workpiece
Zero point
3)
POINT
When Pr.6 has been changed from "0" to "1", check if the upper and lower limit
switches operate properly by JOG operation.
If any malfunction is identified, check and correct the wiring.