

















5 - 61
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
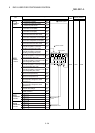
[Table 1]
When " Pr.1 Unit setting" is "mm"
Da.2
setting value
Value set with peripheral device
(
m)
Value set with sequence program *
1
(
10
-1
m)
ABS Linear 1 : 01H
ABS Linear 2 : 04H
Current value change : 11
H
Set the address
–214748364.8 to 214748364.7 *
2
[–13421772.8 to 13421772.7] *
3
Set the address
–2147483648 to 2147483647
[–134217728 to 134217727]
INC Linear 1 : 02H
INC Linear 2 : 05H
Fixed-dimension feed 1 : 03
H
Fixed dimension feed 2 : 06
H
Set the movement amount
–214748364.8 to 214748364.7
[–13421772.8 to 13421772.7]
Set the movement amount
–2147483648 to 2147483647
[–134217728 to 134217727]
Forward run speed/position : 0FH
Reverse run speed/position : 10H
Set the movement amount
0 to 214748364.7
[0 to 13421772.7]
Set the movement amount
0 to 2147483647
[0 to 134217727]
Forward run Speed control : 0DH
Reverse run Speed control : 0EH
JUMP command : 20
H
(Setting not required)*
4
(Setting not required)*
4
ABS Circular interpolation : 07H
ABS Circular right : 09H
ABS Circular left : 0A
H
Set the address
–214748364.8 to 214748364.7
Set the address
–2147483648 to 2147483647
* Circular interpolation control is not possible when using the stepping motor mode.
INC Circular interpolation : 08H
INC Circular right : 0BH
INC Circular left : 0C
H
Set the movement amount
–214748364.8 to 214748364.7
Set the movement amount
–2147483648 to 2147483647
* Circular interpolation control is not possible when using the stepping motor mode.
*
1
Decimal points cannot be used in the sequence program, so input the setting value as an integer.
(The value will be converted into the specified value within the system.)
*
2
Setting range for when "
Pr.11
Stepping motor mode selection" is "standard mode".
*
3
The values shown in parentheses are the setting range for when "
Pr.11
Stepping motor mode selection" is
"stepping motor mode".
*
4
Under stepping motor mode, set the value within the following range:
Setting with peripheral device: –13421772.8 to 13421772.7 (
m)
Setting with sequence program: –134217728 to 134217727 (
10
-1
m)
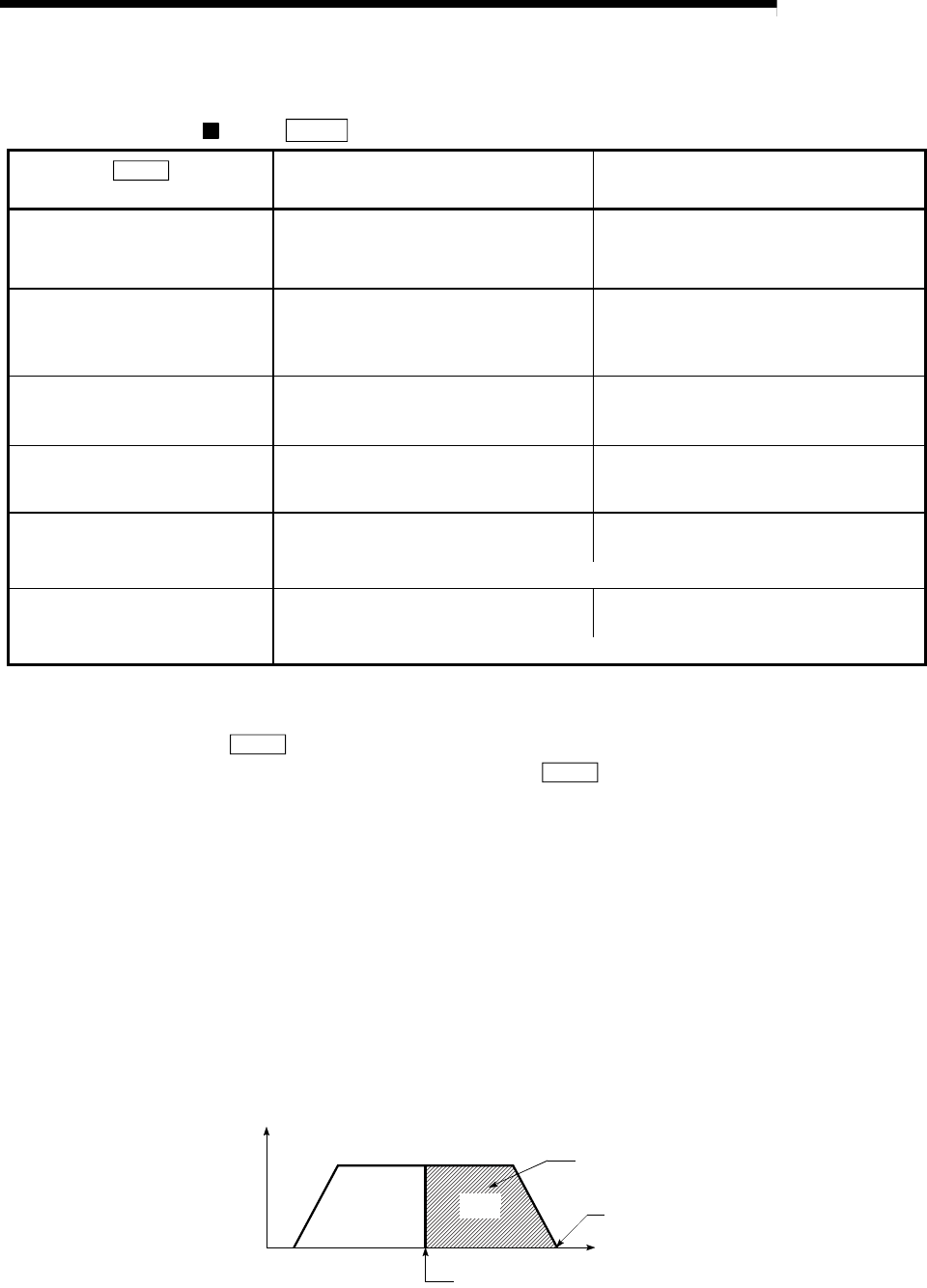
(3) For speed/position changeover control
INC mode: Set the movement amount from when the control changes from the
speed control to the position control.
ABS mode: Set the absolute address that will be the target value to be reached
after speed control is switched to position control. (Only when the
unit is "degree")
Speed
Position
control
Movement amount setting (INC mode)
Time
Speed/position changeover
Speed
control
Target address setting (ABS mode)