


















9 - 56
MELSEC-
A
9 MAIN POSITIONING CONTROL
9.2.10 Current value change
When the current value is changed to a new value, control is carried out in which the
"Current feed value (RWrn + 0 to 1, RWrn + 8 to 9)" of the stopped axis is changed to
a random address set by the user. (The "
Md.30 Machine feed value" is not changed
when the current value is changed.)
The two methods for changing the current value are shown below.
(1) Current value change using the positioning data
(2) Current value change using the start No. (No. 9003) for a current value
change
The current value change using method [1] is used during continuous positioning of
multiple blocks, etc.
(1) Current value change using the positioning data
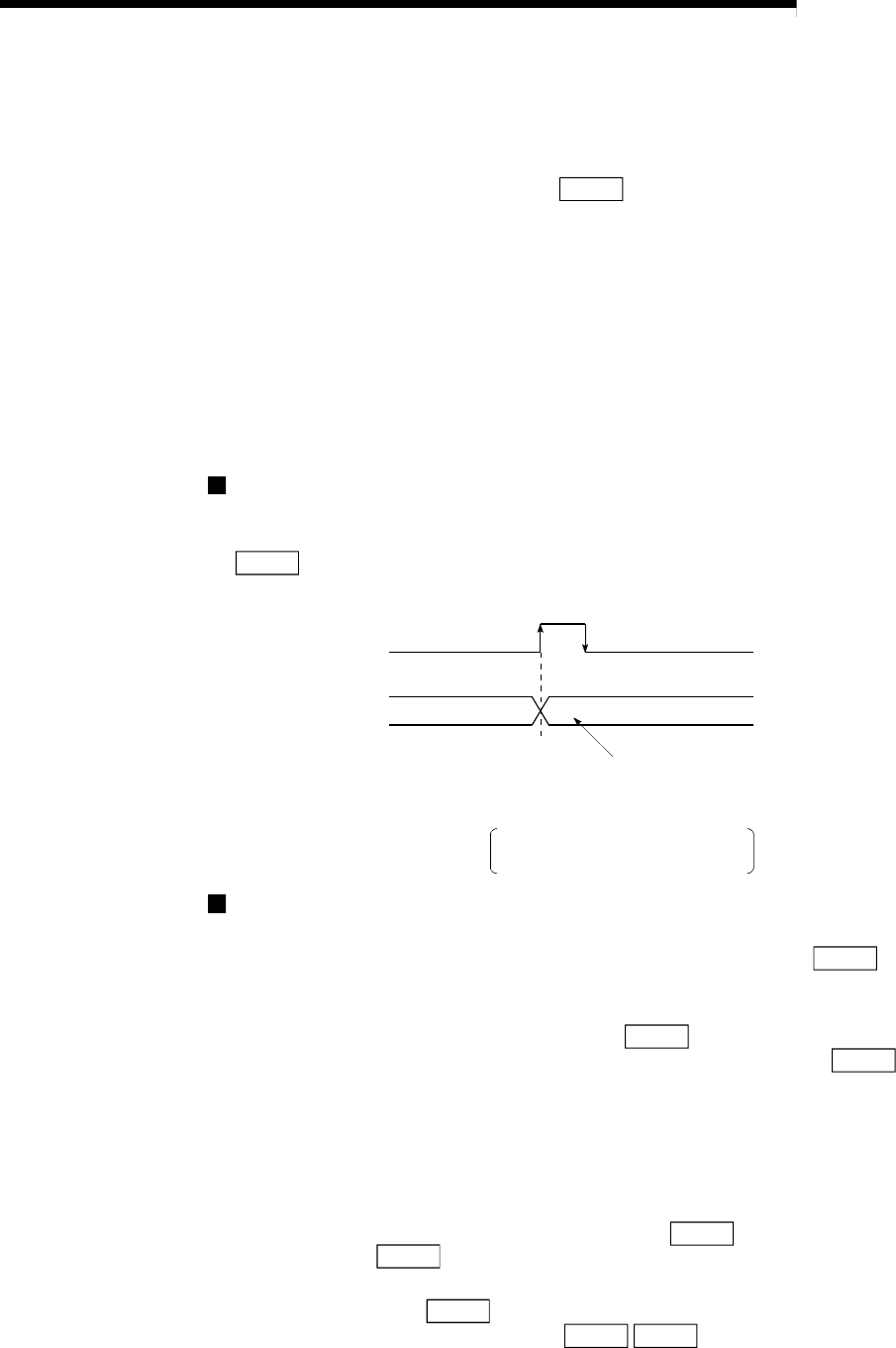
Operation chart
The following chart shows the operation timing for a current value change. The
"Current feed value (RWrn + 0 to 1, RWrn + 8 to 9)" is changed to the value set in
"
Da.5
Positioning address/movement amount" when the positioning start signal
turns ON.
Current value changes to the
positioning address designated by the
positioning data of the current value chage
Positioning start signal
50000
0
OFF
ON
Current feed value
The above chart shows an example
when the positioning address is "0".
[RY(n+1)0, RY(n+1)1]
[RWrn+0 to 1, RWrn+8 to 9]
Restrictions
(1) An error "Current value change not possible" (error code: 515) will occur and
the operation cannot start if "continuous path control" is set in "
Da.1
Operation pattern". ("Continuous path control" cannot be set in current value
change.)
(2) "Current value change" cannot be set in "
Da.2 Control method" of the
positioning data when "continuous path control" has been set in "
Da.1
Operation pattern" of the immediately prior positioning data. (For example, if
the operation pattern of positioning data No. 1 is "continuous path control",
"current value change" cannot be set in positioning data No. 2.) An error
"Current value change not possible" (error code: 515) will occur and the
machine will carry out a deceleration stop if this type of setting is carried out.
(3) An error "Outside current value change range" (error code: 514) will occur and
the operation cannot start if "degree" is set in "
Pr.1 Unit setting" and the
value set in "
Da.5
Positioning address/movement amount" is outside the
setting range (0 to 359.99999 [degree]).
(4) If the value set in "
Da.5
Positioning address/movement amount" is outside
the scope of software stroke limit (
Pr.13 , Pr.14 ), the actual value will be
modified. However, the error "Starting outside of stroke limit +/-" (error code:
507/508) and it will not start up.