



















6 - 59
MELSEC-
A
6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL
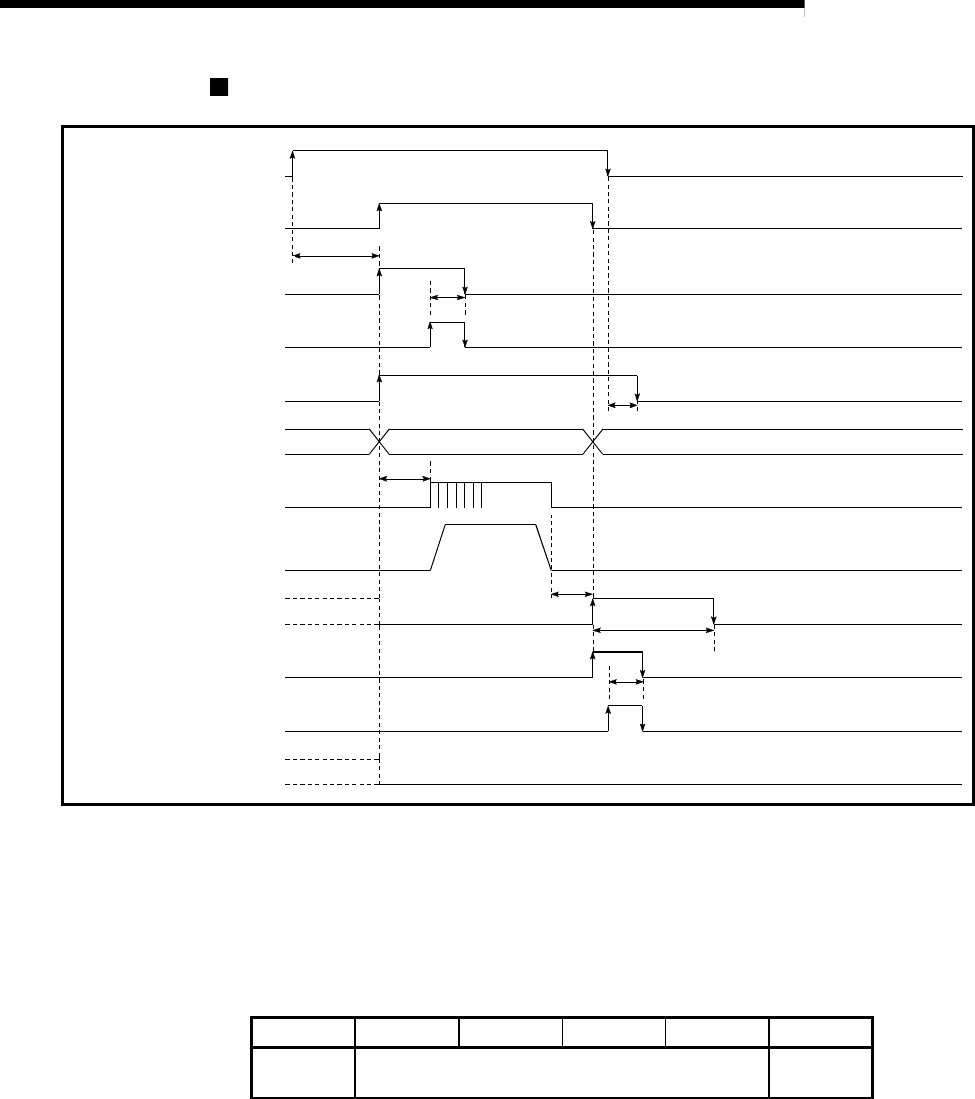
Position control operation timing and process time
M code ON signal
(WITH mode)
M code OFF request
t1
t2
t3
t4
t5
t2
t6
M code OFF request
Positioning start signal
Waiting
Controlling position
Waiting
Zero point return complete flag *
BUSY signal
Output pulse to external source
(PULSE)
Positioning operation
Positioning complete signal *
M code ON signal
(AFTER mode)
Axis operation status
[RY(n+1)0, RY(n+1)1]
[RXn4, RXn5]
[RXnD, RXnE]
[RXn1, RXn2]
[RXnD, RXnE]
[RXn7, RXn8]
[RY(n+2)6, RY(n+4)6]
[RWrn+7, RWrn+15]
[RY(n+2)6, RY(n+4)6]
[RX(n+2)0, RX(n+5)0]
Start complete signal
Fig. 6.10 Position control operation timing and process time
When the positioning start signal turns ON, if all signals marked with an
asterisk (*) are already ON, the signals marked with an asterisk (*) will turn
OFF when the positioning start signal turns ON.
Normal timing time Unit: [ms]
t1 t2 t3 t4 t5 t6
5 to 15 0 to 3.5
Follows
parameters
The t1 timing time could be delayed by the following factors.
1) Operation state of other axes
2) Presence of intervention from peripheral device during start process
3) Details of positioning data to be started