



















8 - 18
MELSEC-
A
8 ZERO POINT RETURN CONTROL
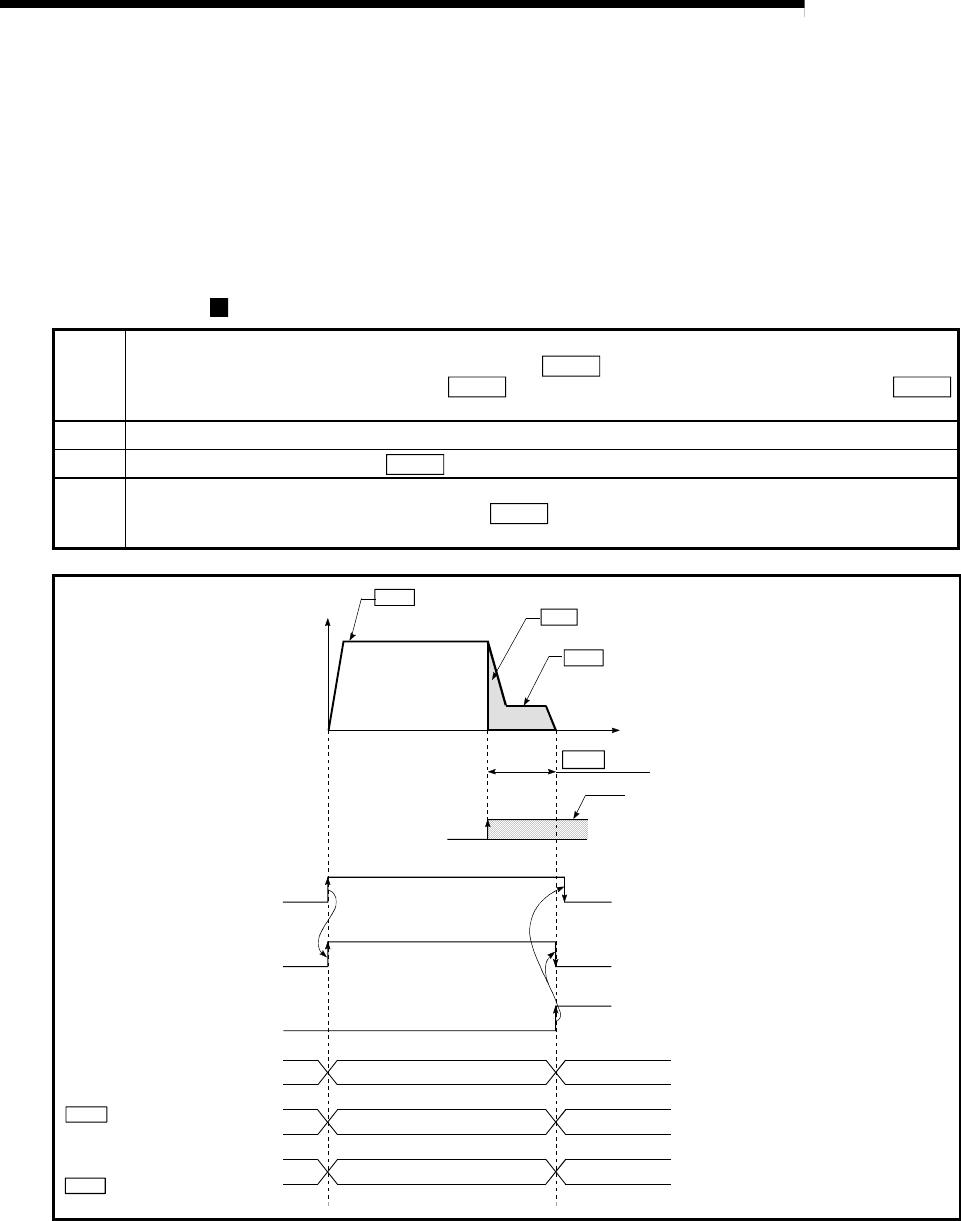
8.2.8 Zero point return method (6): Count method 2)
The following shows an operation outline of the "count method 2)" zero point return
method.
The "count method 2)" method is effective when a "zero point signal" cannot be
received. (Note that compared to the "count method 1)" method, using this method will
result in more deviation in the stop position during machine zero point returns.)
Operation chart
1)
The machine zero point return is started.
(The machine begins the acceleration designated in " Pr.53 Zero point return acceleration time
selection", in the direction designated in "
Pr.46 Zero point return direction". It then moves at the " Pr.48
Zero point return speed" when the acceleration is completed.)
2) The machine begins decelerating when the near-point dog ON is detected.
3)
The machine decelerates to the "
Pr.49 Creep speed", and subsequently moves at that speed.
4)
The pulse output from the D75P2 will stop and the machine zero point return will be completed when the
machine moves the movement amount set in "
Pr.52 Setting for the movement amount after near-point
dog ON " from the near-point dog ON position.
Md.30 Machine feed value
t
V
ON
OFF
ON
OFF
ON
ON
OFF
0
OFF
Pr. 48 Zero point return speed
Pr. 49 Creep speed
Pr.52 Setting for the movement amount
after near-point dog ON
Md.44 Movement amount after near-point dog ON
Machine zero point return start
(Positioning start signal)
In zero point return
Inconsistent
Value the machine moved is stored
Inconsistent
Md.44 Movement amount
after near-point dog ON
Current feed value
[RWrn+0 to 1, RWrn+8 to 9]
Zero point return request flag
[RX(n+1)F, RX(n+4)F]
Zero point return complete flag
[RX(n+2)0, RX(n+5)0]
Axis operation status
[RWrn+7, RWrn+15]
Standing by
Standing by
Value of *1.
Zero point address
*
1
1) 2) 3) 4)
There is no problem even if deactivation at the
near-point dog occurs during machine zero point
return.
However, deactivation at the near-point dog
should be as far from the zero position as possible,
due to the following reason.
If deactivation at the near-point dog occurs at the
end of machine zero point return, the motor is not
stopped in the second action until the upper or
lower limit is reached when repetitive machine zero
point return cycles occur. If the zero point return
retry function has been invalidated, an error is
caused upon detection of the limit.
Fig. 8.13 Count method 2) machine zero point return