



















Appendix - 45
MELSEC-
A
APPENDICES
STEP OUT
Stepping motors rotate in proportion to the No.
of pulses (frequency), but the motor's rotation
will deviate if the load is too large for the
motor. This is called step out. If step out
occurs, the motor must be replaced by one
with a larger torque. Step out causes the
positioning error to increase.
Motor
Motor
torque
Load
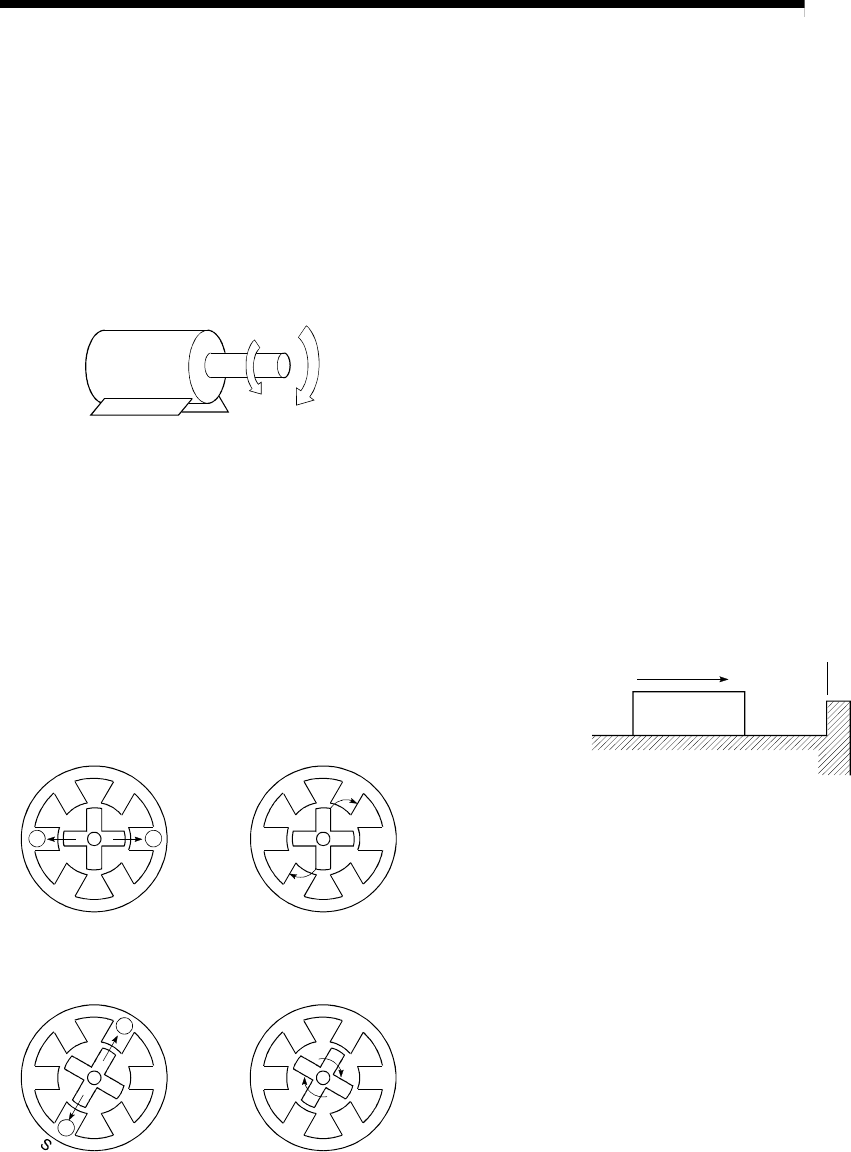
STEPPING MOTOR
A motor that rotates a given angle (example:
0.15
°
) when 1 pulse is generated.
For that reason, a rotation proportional to the
No. of pulses can be obtained. 2-phase to 5-
phase stepping motors are available. In the 3-
phase type, the rotor rotates in order from A to
C when a voltage is applied. Often found in
compact motors, stepping motors rotate
accurately without feedback. Be careful of step
out when overloaded.
4) As the excitation phase is
continuously changed, the rotor
rotates in a clockwise direction.
1) First, the A phase is excited
by a pulse.
2) When the B phase is then excited,
the force works in the direction
shown by the arrows.
3) The nearest tooth to the
B phase is attracted, and the
rotation stops.
A A
C
CB
B
N
S
C
C
AA
N
S
C
C
AA
N
C
CB
BB
B
AA
STOP SETTLING TIME
Refer to the term "DWELL TIME".
STOP SIGNAL
In positioning control, this is the input signal X
that directly stops the operation from an
external source.
The operation stops when the external STOP
signal (a contact) turns ON (continuity), and X
turns ON.
STOPPER STOP
This is one machine zero point return method.
With this method, a stopper is established at
the zero point, and the operation is stopped
when the machine presses against it.
Motor burning would occur or the stopper
would be damaged if the machine were left in
that state. There are two methods to prevent
this; a timer can be used to shut OFF the
motor after a fixed time, or the motor can be
stopped by limiting sudden increase in the
motor torque when the machine presses
against the stopper.
Machine zero point return
Zero point
Stopper
STROKE
The stroke is the variation in the operation by
the distance from a stopped state to the next
stopped state after a movement.