

















5 - 62
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
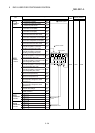
When " Pr.1 Unit setting" is "degree"
Da.2
setting value
Value set with peripheral device
(degree)
Value set with sequence program *
1
(
10
-5
degree)
ABS Linear 1 : 01H
ABS Linear 2 : 04H
Current value change : 11
H
Set the address
0 to 359.99999 *
2
[0 to 359.99999] *
3
Set the address
0 to 35999999
[0 to 35999999]
INC Linear 1 : 02H
INC Linear 2 : 05H
Fixed-dimension feed 1 : 03
H
Fixed-dimension feed 2 : 06H
Set the movement amount
–21474.83648 to 21474.83647
[–1342.17728 to 1342.17727]
Set the movement amount
–2147483648 to 2147483647
[–134217728 to 134217727]
Forward run speed/position : 0FH
Reverse run speed/position : 10H
In INC mode
Set the movement amount
0 to 21474.83647
[0 to 1342.17727]
In INC mode
Set the movement amount
0 to 2147483647
[0 to 134217727]
In ABS mode
Set the address
0 to 359.99999
[0 to 359.99999]
In ABS mode
Set the address
0 to 35999999
[0 to 35999999]
Forward run Speed control : 0DH
Reverse run Speed control : 0EH
JUMP command : 12
H
(Setting not required)*
4
(Setting not required)*
4
ABS Circular interpolation : 07H
ABS Circular right : 09H
ABS Circular left : 0A
H
INC Circular interpolation : 08
H
INC Circular right : 0BH
INC Circular left : 0C
H
Circular interpolation control is not possible
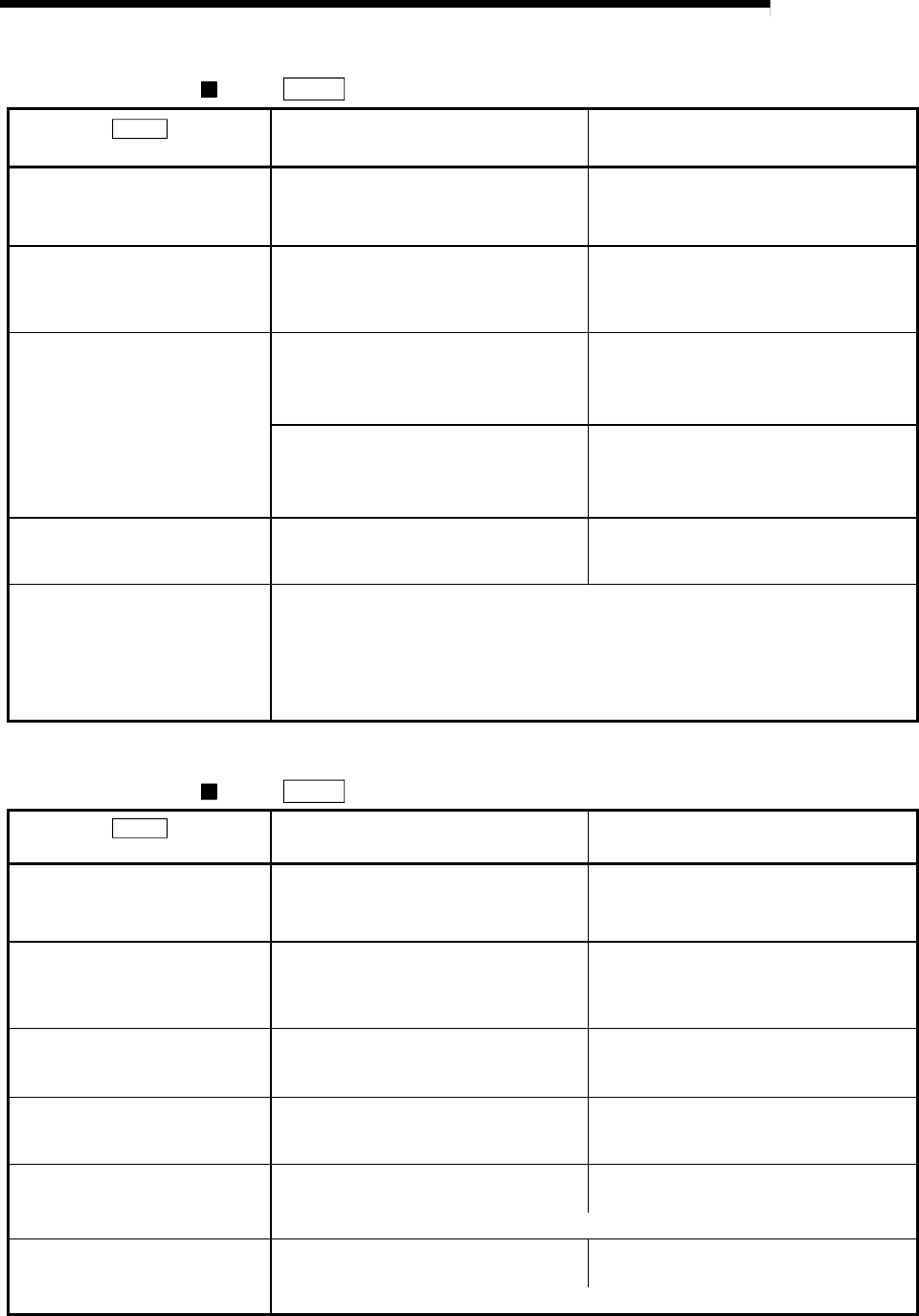
When " Pr.1 Unit setting" is "pulse"
Da.2
setting value
Value set with peripheral device
(pulse)
Value set with sequence program *
1
(pulse)
ABS Linear 1 : 01H
ABS Linear 2 : 04H
Current value change : 11
H
Set the address
–2147483648 to 2147483647 *
2
[–134217728 to 134217727] *
3
Set the address
–2147483648 to 2147483647
[–134217728 to 134217727]
INC Linear 1 : 02H
INC Linear 2 : 05H
Fixed-dimension feed 1 : 03
H
Fixed-dimension feed 2 : 06H
Set the movement amount
–2147483648 to 2147483647
[–134217728 to 134217727]
Set the movement amount
–2147483648 to 2147483647
[–134217728 to 134217727]
Forward run speed/position : 0FH
Reverse run speed/position : 10H
Set the movement amount
0 to 2147483647
[0 to 134217727]
Set the movement amount
0 to 2147483647
[0 to 134217727]
Forward run Speed control : 0DH
Reverse run Speed control : 0EH
JUMP command : 20H
(Setting not required)*
4
(Setting not required)*
4
ABS Circular interpolation : 07H
ABS Circular right : 09
H
ABS Circular left : 0A
H
Set the address
–2147483648 to 2147483647
Set the address
–2147483648 to 2147483647
* Circular interpolation control is not possible when using the stepping motor mode.
INC Circular interpolation : 08H
INC Circular right : 0BH
INC Circular left : 0C
H
Set the movement amount
–2147483648 to 2147483647
Set the movement amount
–2147483648 to 2147483647
* Circular interpolation control is not possible when using the stepping motor mode.