


















14 - 13
MELSEC-
A
14 TROUBLESHOOTING
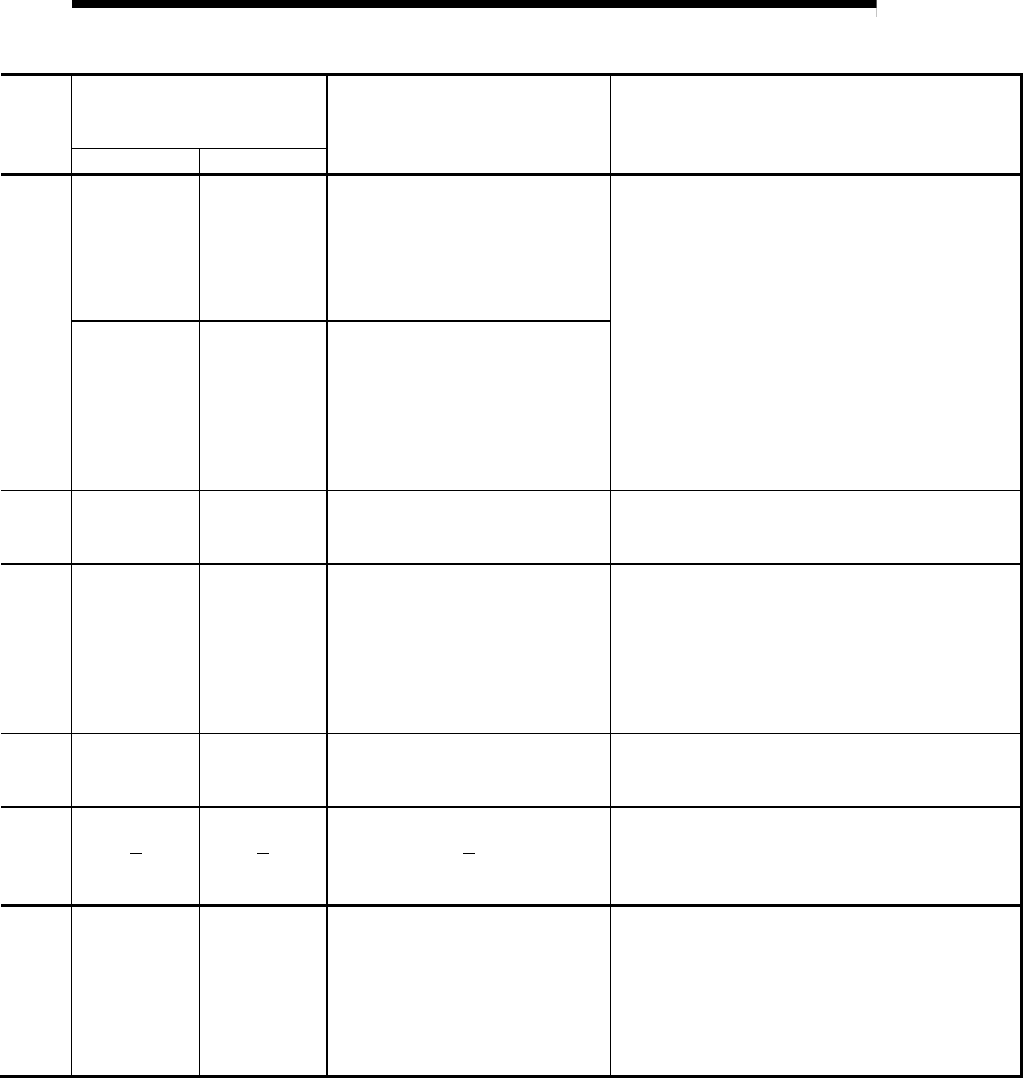
Relevant buffer memory address
remote input/output device, or
remote register
Setting range Remedy
Axis 1 Axis 2
80
81
230
231
<Setting for the movement amount after
near-point dog ON>
(In standard mode)
0 to 2147483647
(In stepping motor mode)
0 to 134217727
Calculate the distance of travel according to the speed
limit, zero point return speed and deceleration speed,
and determine the movement amount after activation at
the near-point dog so that the distance of travel is larger
than the deceleration distance.
Set a smaller zero point return speed.
Adjust the near-point dog position so that the movement
amount after activation at the near-point dog becomes
longer. (Refer to sections 8.2.7 and 8.2.8)
74
75
224
225
<Zero point return speed>
(In standard mode)
1 to 1000000 [pulse/s]
1 to 600000000 [mm/min, etc.]
(In stepping motor mode)
1 to 62500 [pulse/s]
1 to 37500000 [mm/min, etc.]
RWwm RWwm+8
<Positioning start No.>
1 to 600, 7000 to 7010
8001 to 8050, 9001 to 9003, 9900, 9901
Execute mechanical zero point return (positioning start No.
9001). (Refer to section 8.2)
76
77
226
227
<Creep speed>
(In standard mode)
1 to 1000000 [pulse/s]
1 to 600000000 [mm/min, etc.]
(In stepping motor mode)
1 to 62500 [pulse/s]
1 to 37500000 [mm/min, etc.]
Correct the creep speed to within the zero point return
speed. (Refer to section 5.2.5)
RWwm RWwm+8
<Positioning start No.>
1 to 600, 7000 to 7010
8001 to 8050, 9001 to 9003, 9900, 9901
Execute mechanical zero point return (positioning start No.
9001). (Refer to section 8.2)
Reexamine the wiring (Refer to section 12.6).
Reexamine the sequence program.
RWwm+6
RWwm+7
RWwm+14
RWwm+15
<JOG speed>
(In standard mode)
1 to 1000000 [pulse/s]
1 to 600000000 [mm/min, etc.]
(In stepping motor mode)
1 to 62500 [pulse/s]
1 to 37500000 [mm/min, etc.]
Correct the JOG speed to within the setting range. (Refer
to section 11.2)