

















5 - 25
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
1) If the positioning speed setting is slower than the parameter speed limit, the
actual acceleration/deceleration time will be relatively short. Thus, set the
maximum positioning speed value to be equal to the parameter speed limit
value or a close value under the speed limit value.
2) These settings are value for zero point return, positioning and JOG operation.
3) During interpolation positioning, the acceleration/deceleration item for the
reference axis is valid.
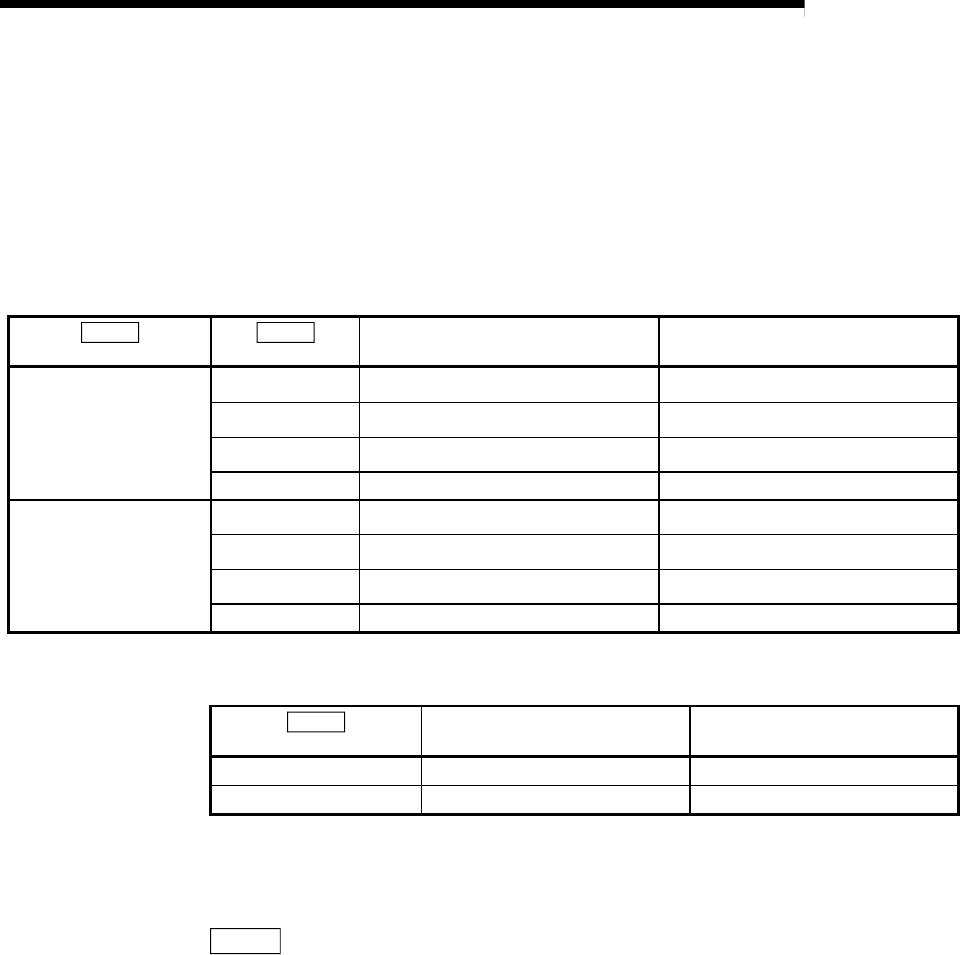
[Table 1]
Pr.11
setting value
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with sequence program
(unit)
0 : Standard mode
0 : mm 0.01 to 6000000.00 (mm/min)
1 to 600000000 (
10
-2
mm/min)
1 : inch 0.001 to 600000.000 (inch/min)
1 to 600000000 (
10
-3
inch/min)
2 : degree 0.001 to 600000.000 (degree/min)
1 to 600000000 (
10
-3
degree/min)
3 : pulse 1 to 1000000 (pulse/s) 1 to 1000000 (pulse/s)
1 : Stepping motor
mode
0 : mm 0.01 to 375000.00 (mm/min)
1 to 37500000 (
10
-2
mm/min))
1 : inch 0.001 to 37500.000 (inch/min)
1 to 37500000 (
10
-3
inch/min)
2 : degree 0.001 to 37500.000 (degree/min)
1 to 37500000 (
10
-3
degree/min)
3 : pulse 1 to 62500 (pulse/s) 1 to 62500 (pulse/s)
[Table 2]
Pr.25
setting value
Value set with peripheral device
(ms)
Value set with sequence program
(ms)
0 : 1-word type 1 to 65535 1 to 65535*
1 : 2-word type 1 to 8388608 1 to 8388608
* 1 to 32767 : Set as a decimal
32768 to 65535 : Convert into hexadecimal and set
Pr.10
Bias speed at start
Set the "minimum speed for starting" for the "bias speed at start". This is set to
smoothly start the motor, such as when using a stepping motor. (If the motor
speed is slow when starting, the stepping motor will not start smoothly.)
The set "bias speed at start" is valid for the following operation.
Positioning operation
Zero point return
JOG operation