



















6 - 42
MELSEC-
A
6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL
*
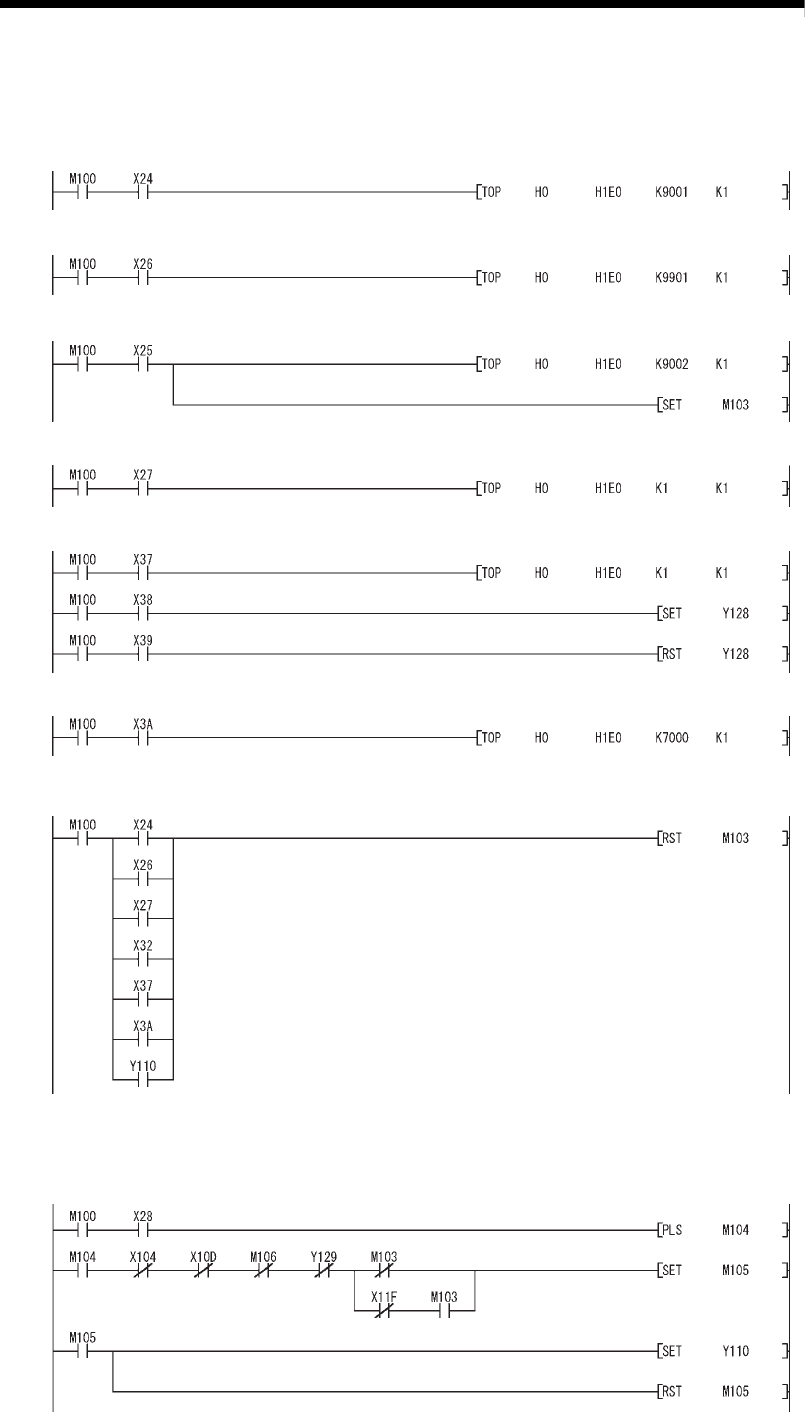
*No. 7 Positioning start number setting program
*
*
*(1) Machine zero point return
*
*
*(2) Data setting method zero point return
*
*
*(3) High-speed zero point return
*
Write machine zero point
return (9001)
Write data setting method
zero point return (9901)
Write high-speed zero
point return (9002)
Hold High-speed zero
point return command
*
*(4) Positioning data No. 1-based positioning (other than speed/position changeover control)
*
Write positioning data
No. 1
*
*(5) Positioning data No. 1-based positioning (speed/position changeover control)
*
*
*(6) Advanced positioning control
*
*
*(7) High-speed zero point return command storage OFF
*(Not required when high-speed zero point return is not used)
*
*
*No. 8 Positioning start signal input program
*(When high-speed zero point return is not performed, contacts X11F and M103 are not required)
*(When M code is not used, contact X10D is not required)
*(When JOG operation is not performed, contact M106 is not required)
*(When manual pulse generator operation is not performed, contact Y129 is not required)
*
Write positioning data
No. 1
Write block positioning
(7000)
Turn OFF High-speed
zero point return
command storage
Convert Positioning start
command into pulse
Positioning start
command held
Enable Speed/position
changeover
Disable Speed/position
changeover
Execute Positioning start
Turn OFF Positioning
start command storage