



















8 - 23
MELSEC-
A
8 ZERO POINT RETURN CONTROL
8.5 Positioning to the zero point
Positioning to the zero point is explained in this section.
To carry out positioning to the zero point, "1-axis linear control (ABS) positioning data"
is created in which the "
Md.43 Zero point absolute position" is set in the positioning
address (
Da.5
). In this case, the other positioning data items are set beforehand in
the flash ROM. (This control is called a "high-speed machine zero point return".)
The "
Pr.47 Zero point address" is a fixed value set by the user, but the " Md.43 Zero
point absolute position" is constantly changed by the D75P2 to indicate the "zero
point", even if there is a change in the address information.
Restrictions
Md.43 Zero point absolute position is not modified in following cases.
Feeding actual value 0 clear when starting fixed dimensions feeding. (Refer to
section 9.2.4 and 9.2.5)
Feeding actual value 0 clear when controlling speed. (Refer to section 9.2.8)
Updating feeding actual value when controlling speed. (Refer to section 9.2.8)
The "zero point absolute position overflow flags" (RX(n+2)3, RX(n+5)3) and the
"zero point absolute position underflow flags" (RX(n+2)4, RX(n+5)4) must be
turned OFF.
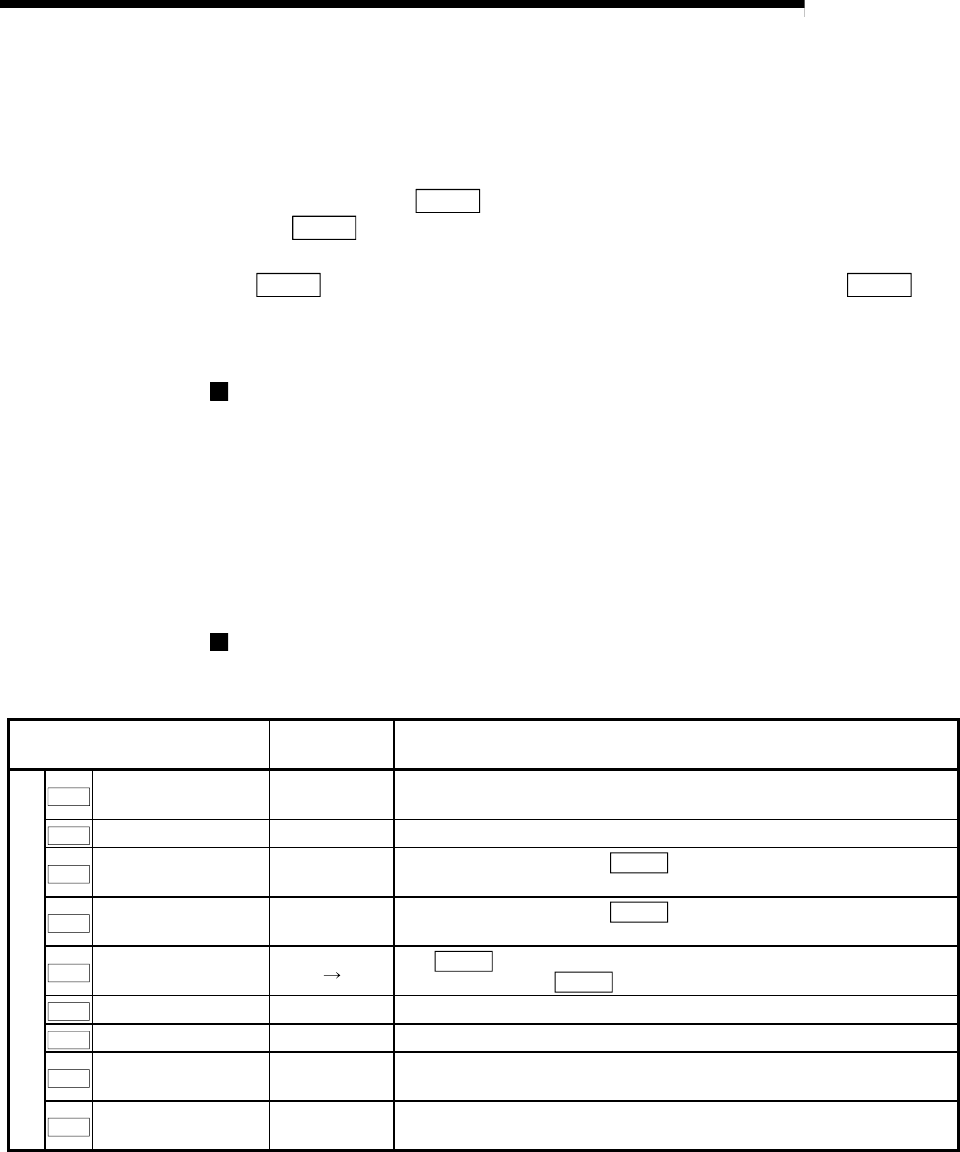
Positioning data setting example
The following table shows setting examples in which "zero point positioning" is set
in the positioning data No. 100 of axis 1.
Setting item
Setting
example
Setting details
Axis 1 Positioning data No. 1
Da.1
Operation pattern
Positioning
complete
Set " Positioning complete " so the next positioning data is not
executed.
Da.2
Control method ABS linear 1 Set the absolute system 1-axis linear control.
Da.3
Acceleration time No. 0
Designate the value set in "
Pr.8 Acceleration time 0" as the
acceleration time at start.
Da.4
Deceleration time No. 0
Designate the value set in " Pr.9 Deceleration time 0" as the
deceleration time at deceleration.
Da.5
Positioning address/
movement amount
Set "
Md.43 Zero point absolute position" in the positioning address.
(Assuming that the "
Pr.1 Unit setting" is set to "mm".)
Da.6
Arc address – Setting not required. (Setting value will be ignored.)
Da.7
Command speed 20.00mm/min Set the speed when moving to the positioning address.
Da.8
Dwell time 500ms
Set the time from the positioning stop (pulse output stop) to the output
of the positioning complete signal.
Da.9
M code 0
Set when carrying out other auxiliary operation commands in
combination with the No. 1 positioning data
* Refer to section "5.3 List of positioning data" for information on the setting details.