



















9 - 48
MELSEC-
A
9 MAIN POSITIONING CONTROL
9.2.9 Speed/position changeover control
In "speed/position changeover control" ("
Da.2
Control method" = Forward run:
speed/position, Reverse run: speed/position), the pulse of the speed set to "
Da.7
Command speed" is kept output until the stop command is input in the axis direction
set to the positioning data, and speed control is switched to position control when the
"speed/position changeover signal" is input.
The two types of speed/position changeover control are "Forward run: speed/position"
in which the control starts in the forward run direction, and "Reverse run:
speed/position" in which control starts in the reverse run direction.
Speed/position changeover control is available in two types: "increment method" and
"absolute method".
(1) Increment method (INC mode)
After control is switched to position control, positioning is carried out by the
movement amount set in "
Da.5
Positioning address/movement amount".
(2) Absolute method (ABS mode)
After control is switched to position control, positioning is carried out to the
address set in "
Da.5
Positioning address/movement amount". The ABS mode
is valid only when "
Pr.1
Unit setting" is "2: degree".
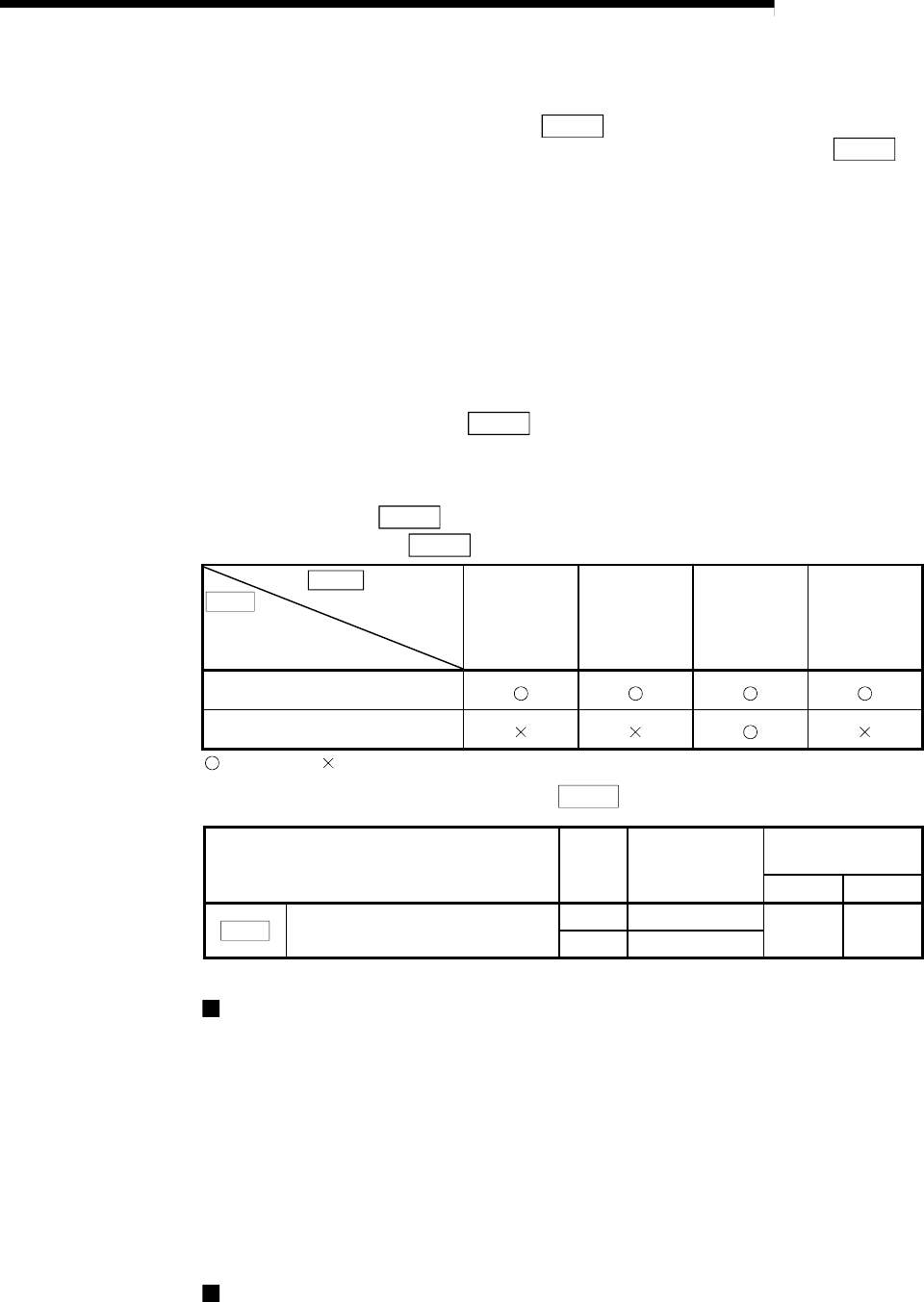
Pr.1
Unit setting
Cd.36
Speed/position
changeover control
(ABS mode) function valid flag
mm inch degree pulse
INC mode (bit 0: 0)
ABS mode (bit 0: 1)
: Can be set, : Cannot be set.
Select the INC mode or ABS mode using "
Cd.36
Speed/position changeover control
(ABS mode) function valid flag".
Setting item
Setting
value
Setting details
Buffer memory
address
Axis 1 Axis 2
Cd.36
Speed/position changeover control
(ABS mode) function valid flag
0 INC mode
1189 1239
1 ABS mode
* For more information on the setting details, refer to section "5.7 List of control data".
Changing over from speed control to position control
(Common to INC mode and ABS mode)
(1) The control is changed over from speed control to position control by the
external signal "speed/position changeover signal".
(2) Besides setting the positioning data, the "Speed/position changeover enable
flag (RY(n+2)8, RY(n+4)8)" must also be turned ON to change over from
speed control to position control. (If the "Speed/position changeover enable
flag (RY(n+2)8, RY(n+4)8)" turns ON after the speed/position changeover
signal turns ON, the control will continue as speed control without changing
over to position control. Only position control will be carried out when the
"Speed/position changeover enable flag (RY(n+2)8, RY(n+4)8)" and
speed/position changeover signal are ON at the operation start.)
Operation chart (Common to INC mode and ABS mode)
The following chart (Fig.9.10) shows the operation timing for speed/position
changeover control. The "in speed control flag" (RX(n+1)C, RX(n+4)C)" is turned
ON during speed control of speed/position changeover control.