



















9 - 7
MELSEC-
A
9 MAIN POSITIONING CONTROL
(3) Continuous path control
(a) Continuous path control
1) The speed is changed between the speed of the positioning data
currently being positioned and the speed of the positioning data that
will be positioned next.
The speed is not changed if the current speed and the next speed are
equal.
2) The speed will become the speed used in the previous positioning
operation if the command speed is set to "-1".
3) Dwell time will be ignored, even if set.
4) The next positioning No. is executed automatically in operations by
continuous path control (operation pattern "11"). Always terminate the
positioning by setting operation pattern "00" in the last positioning data.
If the operation pattern is set to positioning continue ("01" or "11"), the
operation will continue until operation pattern "00" is found.
The operation may be carried out until the max. data item No. 600 if
operation pattern "00" cannot be found because it was not set in the
last positioning data.
5) The speed changeover patterns include the "front-loading speed
changeover pattern" in which the speed is changed at the end of the
current positioning side, and the "standard speed changeover pattern"
in which the speed is at the start of the next positioning side. (Refer to
"
Pr.20 Speed changeover mode".)
Continuous path control Standard speed changeover mode
Front-loading speed changeover mode
OFF
ON
OFF
ON
OFF
ON
OFF
ON
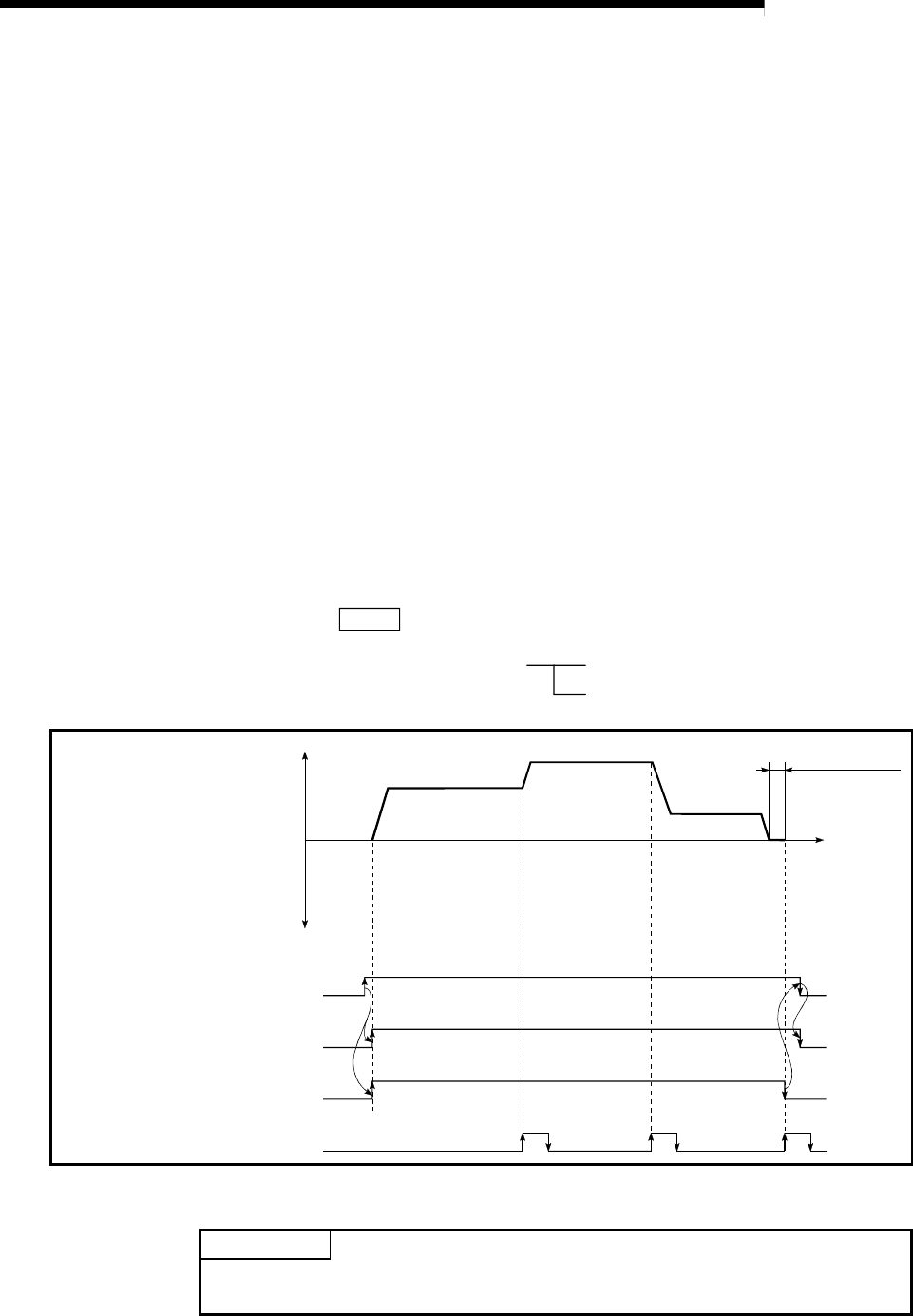
Time
Positioning continue (11)
Dwell time
Positioning continue (11)
Start complete signal
BUSY signal
Positioning complete signal
Positioning start signal
Positioning
complate (00)
Address (+) direction
Address (-) direction
[RXn1, RXn2]
[RXn4, RXn5]
[RXn7, RXn8]
[RY(n+1)0, RY(n+1)1]
Fig. 9.3 Operation during continuous path control (Standard speed changeover mode)
POINT
Speed fluctuation can be eliminated by setting the mode to the near pass mode.
(Refer to section "12.3.3 Near pass mode function".)