


















5 - 32
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
Pr.19
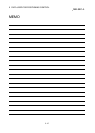
M code ON signal output timing
Set the timing to output the M code ON signal.
The WITH mode and AFTER mode can be used for the M code ON signal output
timing.
WITH mode ..... The M code is output simultaneously
with the start of positioning, and the
M code ON signal turns ON.
* m1, m2 indicate the set M codes.
01 (continuous) 00 (end)
Positioning start signal
[RY(n+1)0, RY(n+1)1]
BUSY signal
[RXn4, RXn5]
M code ON signal
[RXnD, RXnE]
M code OFF request
[RY(n+2)6, RY(n+4)6]
Positioning
Valid M code
[RWrn+4, RWrn+12]
Operation pattern
Da.1
m1 m2
* *
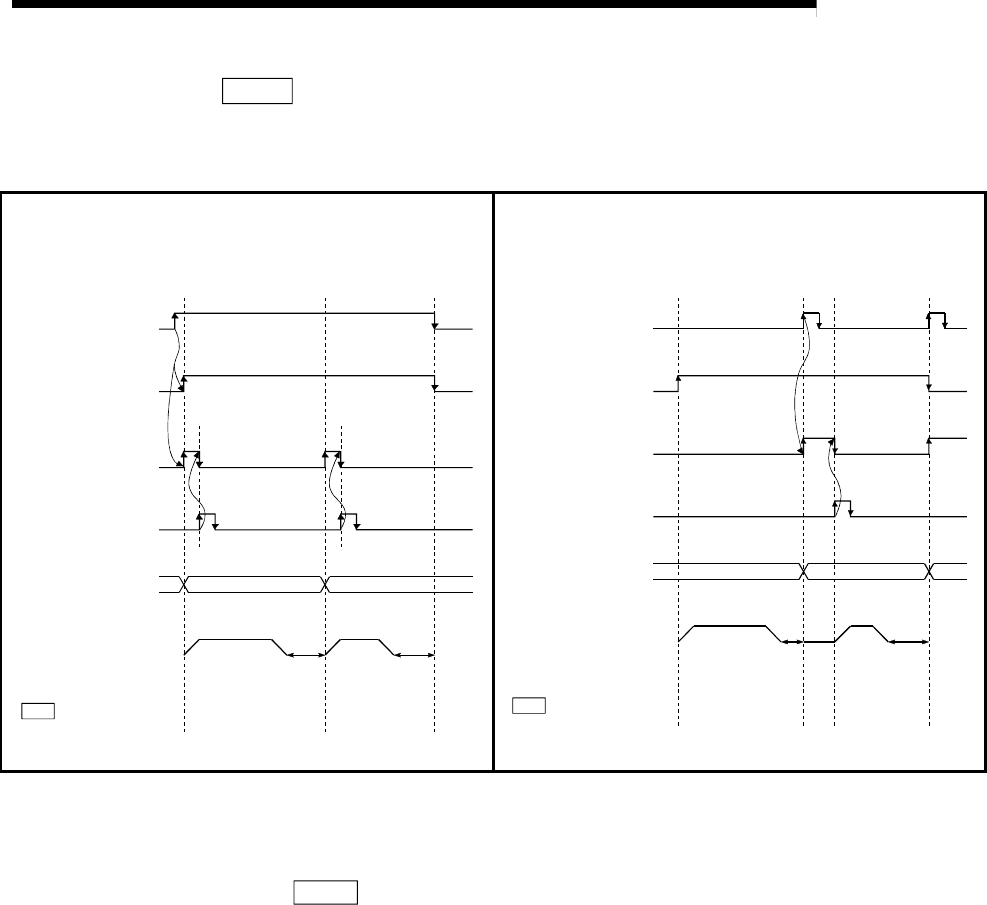
AFTER mode ........ The M code is output
simultaneously with the end of
positioning, and the M code ON
signal turns ON.
* m1, m2 indicate the set M codes.
01 (continuous) 00 (end)
m1 m2
Positioning
Operation pattern
Da.1
BUSY signal
[RXn4, RXn5]
M code ON signal
[RXnD, RXnE]
M code OFF request
[RY(n+2)6, RY(n+4)6]
Valid M code
[RWrn+4, RWrn+12]
Positioning complete
signal [RXn7, RXn8]
* *
Note) When using the AFTER mode with speed control, the M code will not be
output and the M code ON signal will not turn ON.
The M code is a No. between 0 and 32767 that can be set for each positioning
data (
Da.9 ).
When the M code ON signal [RXnD, RXnE] turns ON, "Valid M code (RWrn+4,
RWrn+12)" is read from the buffer memory by the sequence program, and an
auxiliary work (ex., clamping, drill rotation, tool change, etc.) matching the code
No. can be issued.