



















8 - 9
MELSEC-
A
8 ZERO POINT RETURN CONTROL
Restrictions
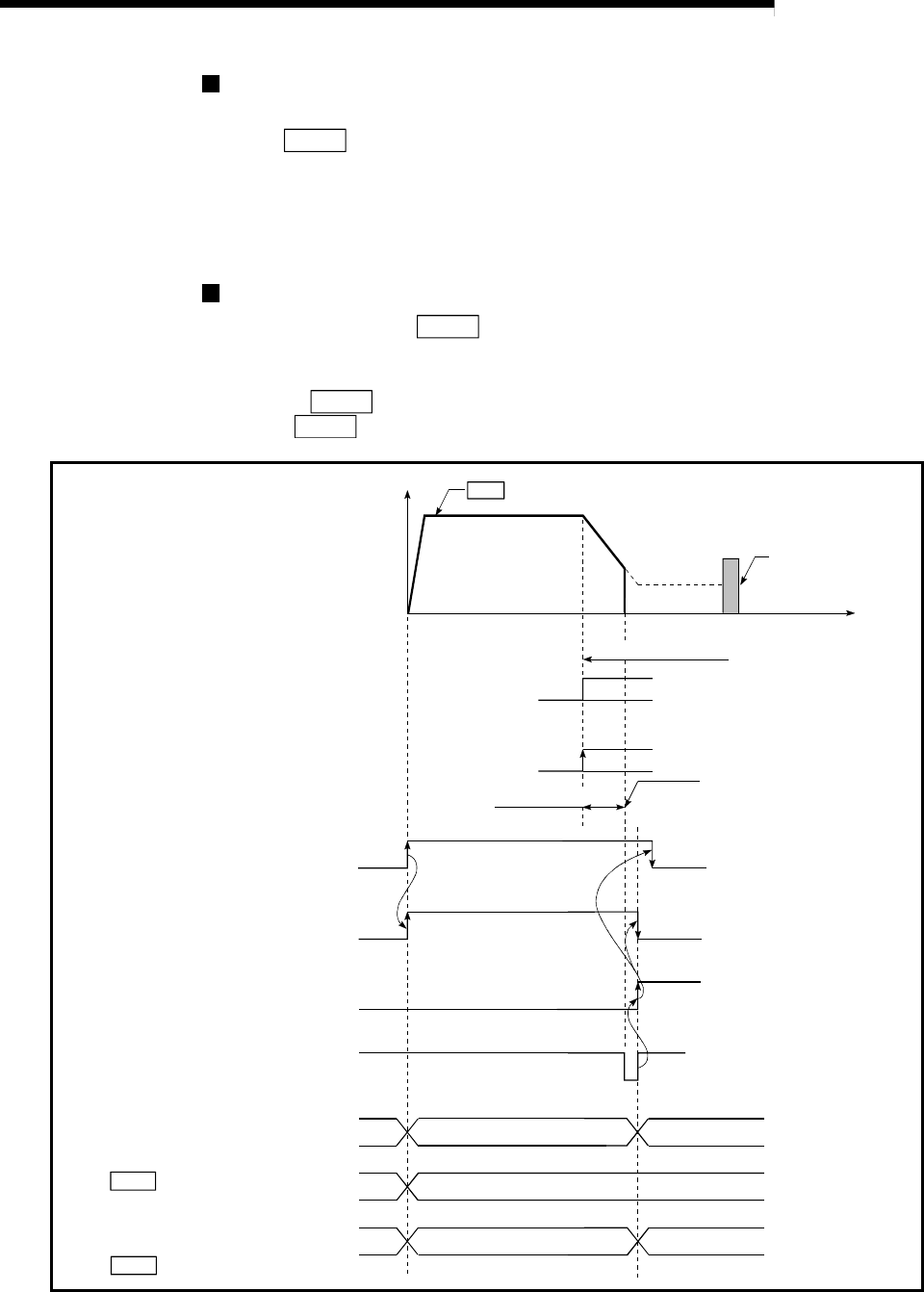
(1) Make sure to limit the torque for the servomotor after starting the deceleration
to "
Pr.49
Creep speed". If the torque is not limited, the servomotor may fail
when the machine presses against the stopper. (Refer to section "12.4.2
Torque limit function".)
(2) The zero point return retry function cannot be used with the “stopper stop
method 1).”
Precautions during operation
(1) Set a value in the "
Pr.51 Zero point return dwell time" that is equal to or
higher than the movement time from the near-point dog ON to the time the
machine presses against the stopper.
(2) If the “
Pr.51 Zero point return dwell time” elapses during deceleration from
the “
Pr.48 Zero point return speed,” deceleration and stop are caused.
Md.44 Movement amount
after near-point dog ON
Axis operation status
[RWrn+7, RWrn+15]
Machine zero point return start
(Positioning start signal)
Zero point return request flag
[RX(n+1)F, RX(n+4)F]
Zero point return complete flag
[RX(n+2)0, RX(n+5)0]
Current feed value
[RWrn+0 to 1, RWrn+8 to 9]
Md.30 Machine feed value
ON
OFF
Zero point return speed
Valid torque limit range
Torque limit
Time out of
dwell time
ON
OFF
OFF
ON
Standing by
In zero point return
Standing by
Inconsistent
0
Inconsistent
Value the machine moved is stored
Zero point address
V
Near-point dog
ON
OFF
t
Pr.48
Stopper
Dwell time measurement
Deviation counter clear output
Fig. 8.4 Operation when the dwell time elapses during deceleration from the zero point return
speed