



















Appendix - 6
MELSEC-
A
APPENDICES
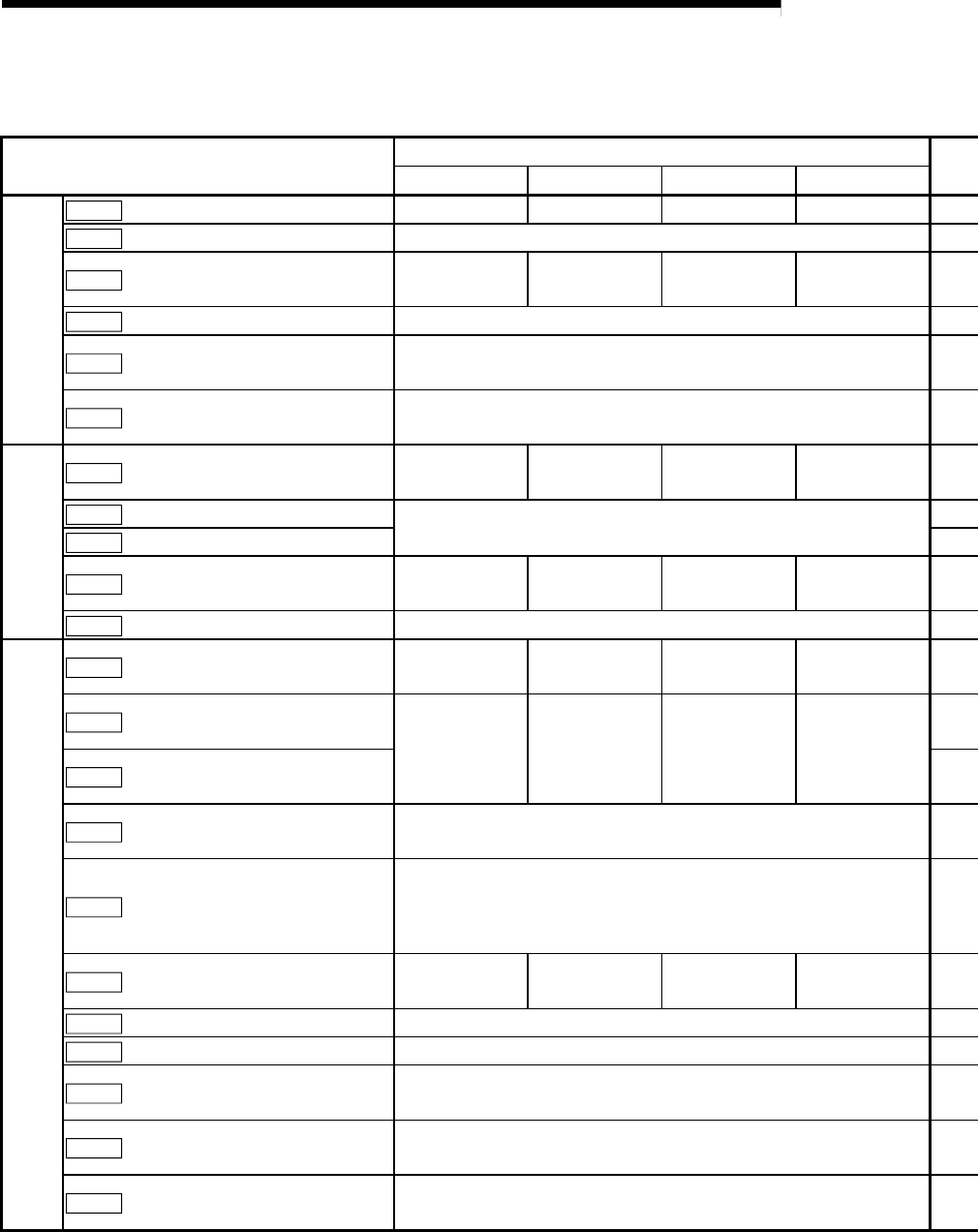
Appendix 3.2 Parameter setting value entry table
Item
Setting range
mm inch degree pulse
Basic parameters 1
Pr.1 Unit setting 0 1 2 3
Pr.2 No. of pulses per rotation (Ap) 1 to 65535 pulse
Pr.3
Movement amount per rotation
(Al)
1 to 65535
10
-1
m
1 to 65535
10
-5
inch
1 to 65535
10
-5
degree
1 to 65535
pulse
Pr.4
Unit magnification (Am) 1: 1-fold, 10: 10-fold, 100: 100-fold, 1000: 1000-fold
Pr.5
Pulse output mode
0: PULSE/SIGN mode, 1: CW/CCW mode,
2: A phase/B phase (multiple of 4), 3: A phase/B phase (multiple of 1)
Pr.6
Rotation direction setting
0: Current value increment with forward run pulse output
1: Current value increment with reverse run pulse output
Basic parameters 2
Pr.7
Speed limit value
1 to 600000000
10
-2
mm/min
1 to 600000000
10
-3
inch/min
1 to 600000000
10
-3
degree/min
1 to 600000000
pulse
Pr.8
Acceleration time 0
1 to 65535ms/1 to 8388608ms
Pr.9
Deceleration time 0
Pr.10
Bias speed at start
0 to 600000000
10
-2
mm/min
0 to 600000000
10
-3
inch/min
0 to 600000000
10
-3
degree/min
0 to 1000000
pulse/s
Pr.11
Stepping motor mode selection 0: Standard mode, 1: Stepping motor mode
Detailed parameters 1
Pr.12 Backlash compensation amount
0 to 65535
10
-1
m
0 to 65535
10
-5
inch
0 to 65535
10
-5
degree
0 to 65535
pulse
Pr.13
Software stroke limit upper limit
value
–2147483648 to
2147483647
10
-1
m
–2147483648 to
2147483647
10
-5
inch
0 to 35999999
10
-5
degree
–2147483648 to
2147483647
pulse
Pr.14
Software stroke limit lower limit
value
Pr.15
Software stroke limit selection
0: Apply software stroke limit on current feed value
1: Apply software stroke limit on machine feed value
Pr.16
Software stroke limit valid/invalid
setting
0: Software stroke limit invalid during JOG operation and manual
pulse generator operation
1: Software stroke limit valid during JOG operation and manual pulse
generator operation
Pr.17
Command in-position width
1 to 32767000
10
-1
m
1 to 32767000
10
-5
inch
1 to 32767000
10
-5
degree
1 to 32767
pulse
Pr.18
Torque limit setting value 1 to 500%
Pr.19
M code ON signal output timing 0: WITH mode, 1: AFTER mode
Pr.20
Speed changeover mode
0: Standard speed changeover mode
1: Front-loading speed changeover mode
Pr.21
Interpolation speed designation
method
0: Composite speed, 1: Reference axis speed
Pr.22
Current feed value during speed
control
0: Do not update current feed value, 1: Update current feed value
2: Clear current feed value to zero