



















9 - 54
MELSEC-
A
9 MAIN POSITIONING CONTROL
<ABS mode only>
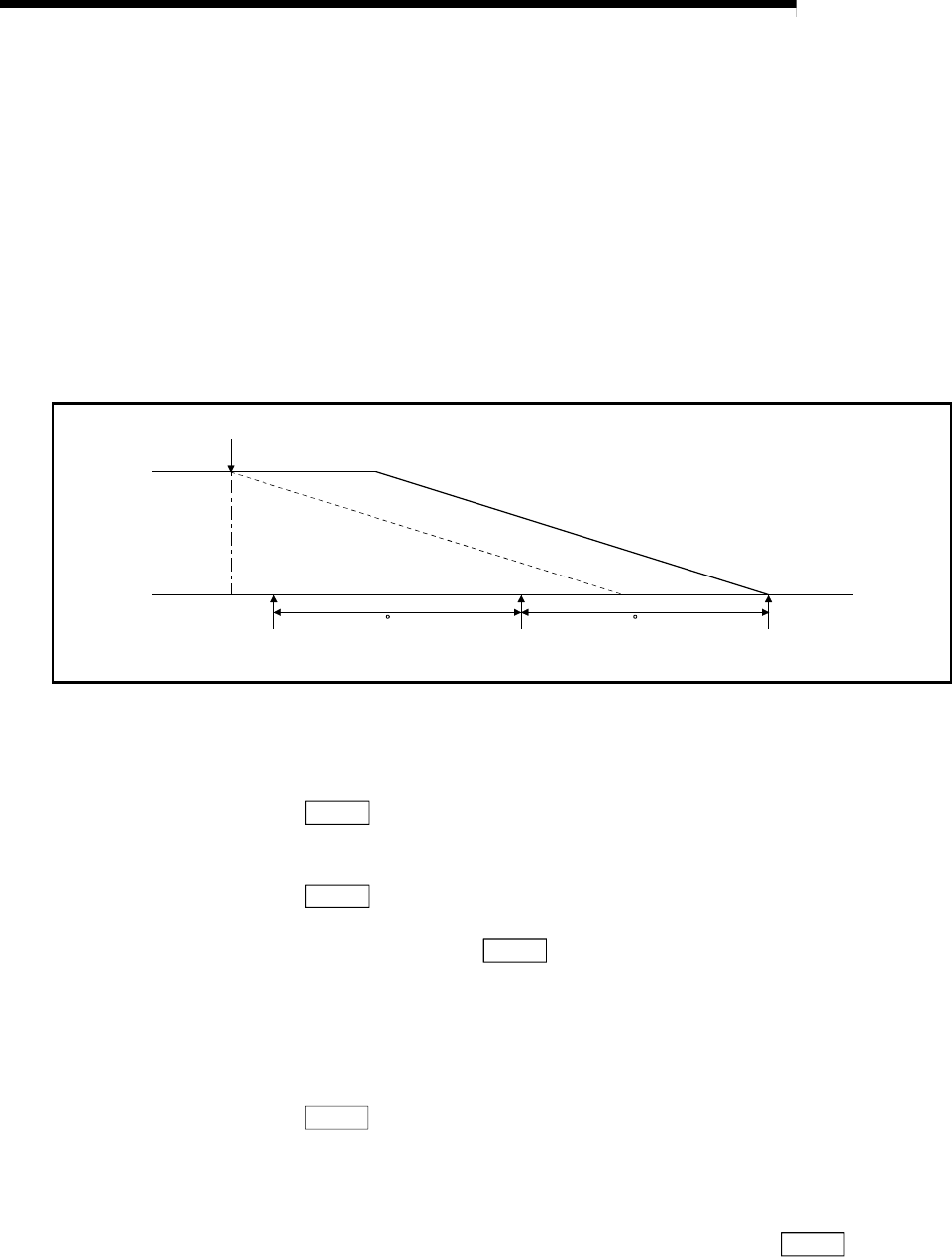
(8) When the positioning address is reached midway during deceleration if
automatic deceleration is started at the input of the speed/position changeover
signal, the machine will not stop immediately at the positioning address. The
machine will stop at the positioning address after N revolutions to ensure that
automatic deceleration can be made without fail. (N: Natural number)
In this case, the movement amount after the speed/position changeover signal
has been turned ON should be 21474.83647[degree] (1342.17727[degree] in
the stepping motor mode) or less.
If the movement amount exceeds this value, decrease the command speed or
shorten the deceleration time, for example, to reduce the movement amount.
In the following example, the machine is decelerated to a stop at the third
positioning address since the positioning address is exceeded twice if
deceleration is made in the dotted path.
Speed/position changeover signal
Positioning
address
Positioning
address
360 added
360 added
Positioning
address
(9) To perform speed/position changeover control in the ABS mode, the following
conditions must be satisfied. If any of the following conditions is not satisfied,
the machine will operate in the INC mode.
(a) The "speed/position changeover enable flag (RY(n+2)8, RY(n+4)8)" is ON.
(b) "
Pr.1
Unit setting" is "2: degree".
(c) The software stroke limit function is invalid (upper limit value = lower limit
value).
(d) "
Pr.22
Current feed value during speed control" is "1: Update current feed
value".
(e) The setting range of "
Da.5
Positioning address/movement amount" is 0 to
359.99999 (degree).
If it is outside the range 0 to 359.99999 (degree), an error (error code: 530)
will occur at a start.
(f) The speed/position changeover signal is not ON at a start (only the signal
during operation is valid).
(g) "
Cd.36
Speed/position changeover control (ABS mode) function valid flag"
is "1: ABS mode".
(10) Speed/control changeover control in the ABS mode does not perform the
nearest path access control for position control.
The rotation direction for position control is determined by "
Da.2
Control
method".