


















9 - 55
MELSEC-
A
9 MAIN POSITIONING CONTROL
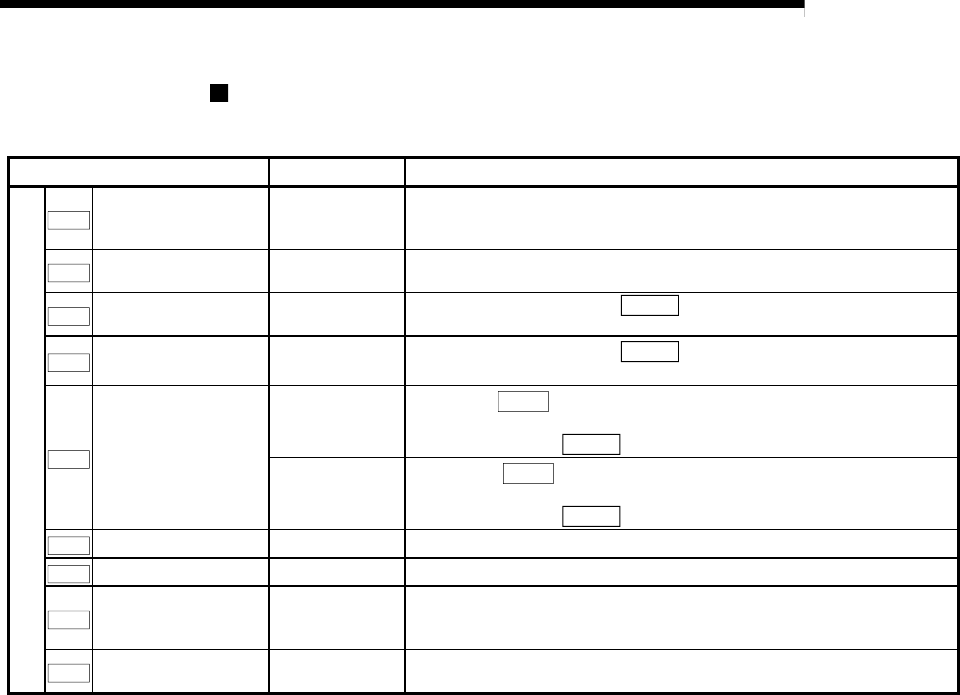
Positioning data setting examples
The following table shows setting examples when "speed/position changeover
control (forward run: speed/position)" is set in positioning data No. 1 of axis 1.
Setting item Setting example Setting details
Positioning data No. 1
Da.1
Operation pattern
Positioning
complete
Set "Positioning complete" assuming the next positioning data will not
be executed. ("Continuous path control" cannot be set in
speed/position changeover control.)
Da.2
Control method
Forward run:
speed/position
Set speed/position changeover control.
Da.3
Acceleration time No. 1
Designate the value set in "
Pr.26 Acceleration time 1" as the
acceleration time at start.
Da.4
Deceleration time No. 0
Designate the value set in "
Pr.9 Deceleration time 0" as the
deceleration time at deceleration.
Da.5
Positioning address/
movement amount
10000.0
m
INC mode (
Cd.36
is 0)
Set the movement amount after control is switched to position control.
(It is assumed that "
Pr.1 Unit setting" is "mm".)
269.71869
degree
ABS mode (
Cd.36
is 1)
Set the positioning address after control is switched to position control.
(It is assumed that "
Pr.1 Unit setting" is "degree".)
Da.6
Arc address – Setting not required. (Setting value is ignored.)
Da.7
Command speed 6000.00mm/min Set the speed to be commanded.
Da.8
Dwell time 500ms
Set a time from the positioning stop (pulse output stop) by position
control until the positioning complete signal is output. When the
system is stopped by speed control, ignore the setting value.
Da.9
M code 10
Set this when other sub operation commands are issued in
combination with the No.1 positioning data.
* Refer to section "5.3 List of positioning data" for information on the setting details.