



















6 - 53
MELSEC-
A
6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL
6.6.3 Start program
This program is used to start the control with start commands.
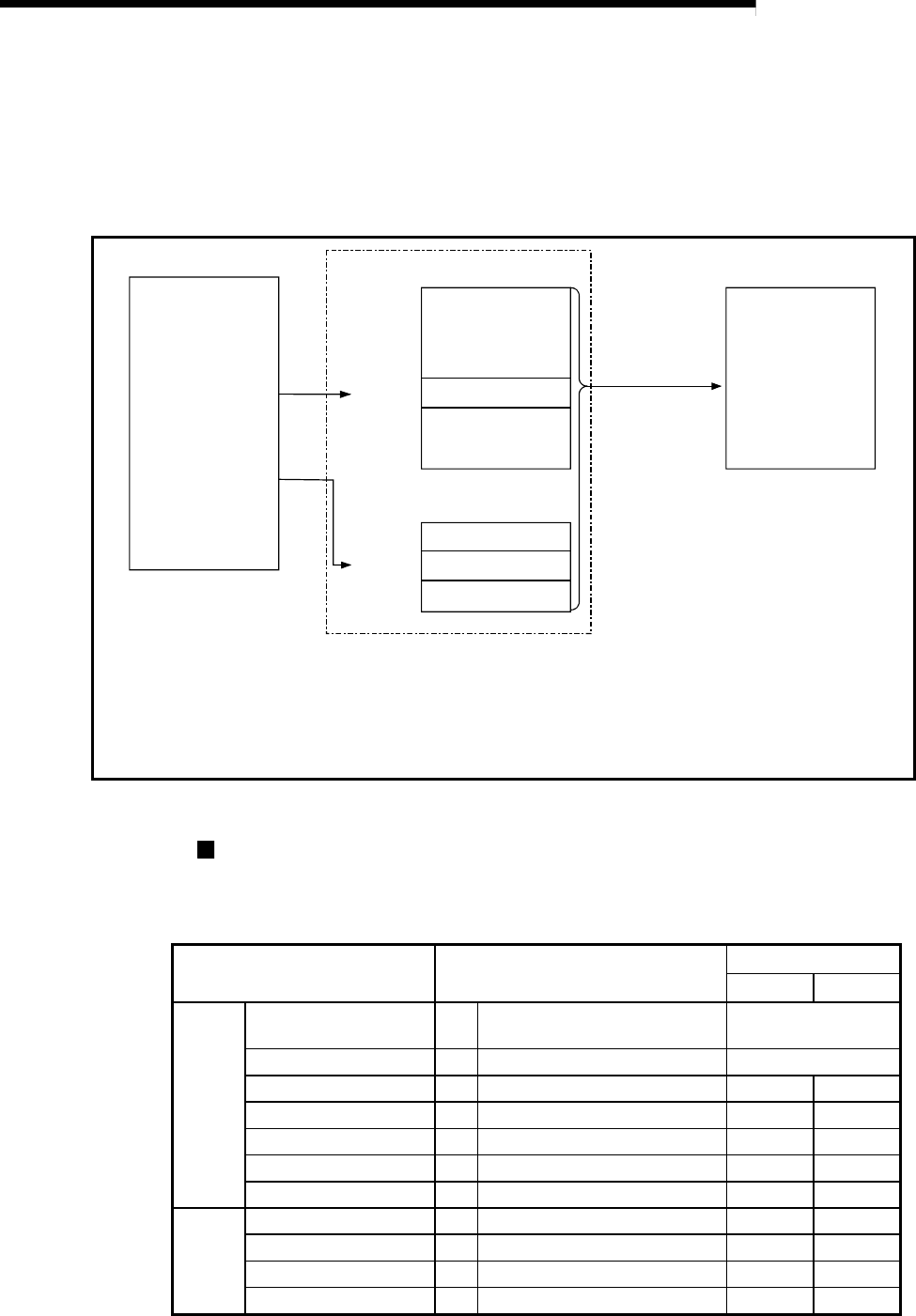
The control can be started with the following two methods.
(1) Starting by inputting positioning start signal [RY(n+1)0, RY(n+1)1]
(2) Starting by inputting external start signal
Master module
Remote register
RWwm
Input/output signal
1
1)
ON
2)
RY(n+1)0
Drive unit
Control with
positioning data
No. 1
3)
When starting positioning with the scan
after the completion of positioning,
insert RXn1 as an interlock so that
positioning is started after RY(n+1)0 is
turned OFF and RXn1 is turned OFF.
*
1) Set the "positioning start No." in "Positioning start No. (RWwm, RWwm+8)" according to
the control to be started.
(In the above example, set positioning data No. "1".)
2) Input the positioning start signal [RY(n+1)0, RY(n+1)1] or the external start signal.
3) The positioning data No. "1" will start.
Fig. 6.2 Procedures for starting control
Starting conditions
When starting, the following conditions must be satisfied. The program must be
configured by adding the required conditions into the sequence program so that
the operation does not start until the conditions are satisfied.
Signal name Signal state
Device
Axis 1 Axis 2
Interface
signal
Remote station READY
signal
ON Positioning operation possible RX(n+7)B
D75P2 READY signal OFF D75P2 preparation completed RXn0
Axis stop signal OFF Axis stop signal is OFF RY(n+1)3 RY(n+1)4
Start complete signal OFF Start complete signal is OFF RXn1 RXn2
BUSY signal OFF BUSY signal is OFF RXn4 RXn5
Error detection signal OFF There is no error RXnA RXnB
M code ON signal OFF M code ON signal is OFF RXnD RXnE
External
signal
Drive unit READY signal ON Drive unit preparation completed RX(n+1)2 RX(n+4)2
Stop signal OFF Stop signal is OFF RX(n+1)6 RX(n+4)6
Upper limit (FLS) ON Within limit range RX(n+1)7 RX(n+4)7
Lower limit (RLS) ON Within limit range RX(n+1)8 RX(n+4)8