



















Appendix - 46
MELSEC-
A
APPENDICES
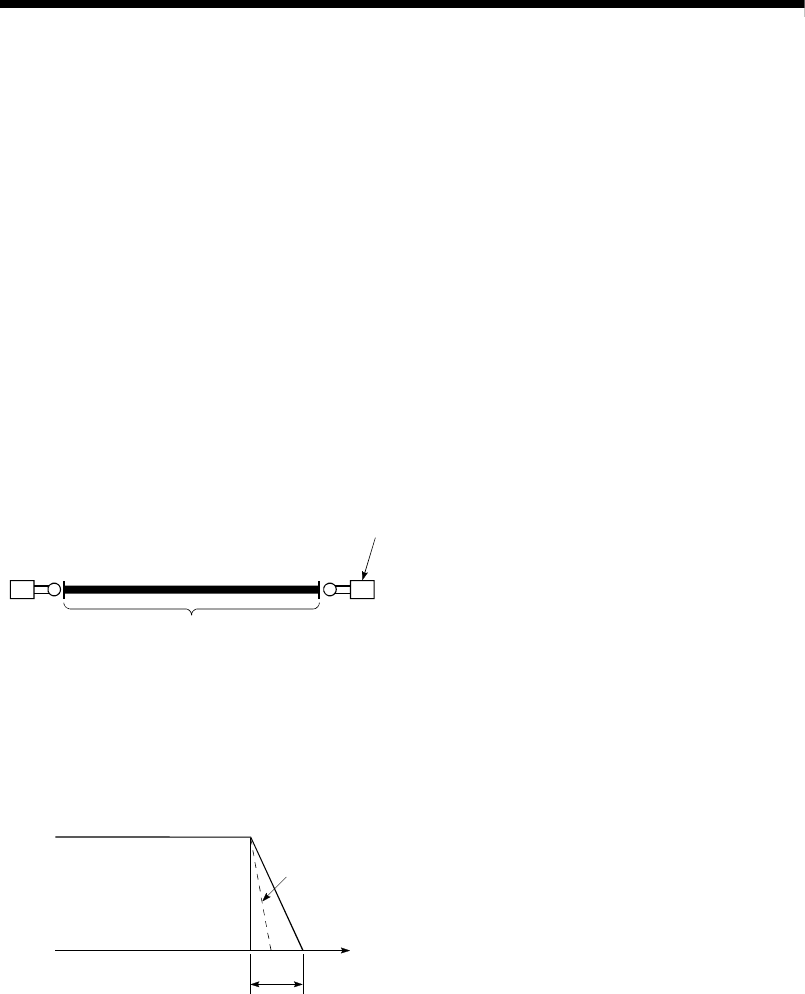
STROKE LIMIT
This is the range in which a positioning
operation is possible, or the range in which the
machine can be moved without damage
occurring.
(Movement outside this range is possible in
the manual operation.) For operations using a
worm gear, the stroke limit is determined by
the length of the screw. For operations using a
fixed-dimension feed, it is determined by the
max. dimension to be cut.
The upper and lower limits are set in the
parameters, but a separate limit switch should
be established and an emergency stop circuit
outside the PLC should be created. Refer to
the term "LIMIT SWITCH".
Lower limit
0
Upper limit
3m
Limit switch
for emergency
stop
Positioning possible in a 3m range
SUDDEN STOP
A stop carried out in a shorter time than the
deceleration time designated in the
parameters.
Full speed
Sudden stop
Tim
e
Deceleration time
TEACHING
When the positioning address is uncertain, or
gauging is required, this function is used by
the user to search for and teach the position to
the machine.
For example, complex addresses such as
drawings can be taught by tracing a model,
and the positioning operation can be
reproduced.
TEACHING UNIT
This is a device capable of writing, reading,
running, and monitoring data.
It is used connected to the D75P2. The model
is AD75TU.
TORQUE CONTROL
In this function, a limit is established for the
resistance torque applied to the motor. The
power is turned OFF if torque exceeding that
value is applied to the motor.
When excessive torque is applied to a motor, it
causes the current to suddenly increase. Motor
burning and other stress on the motor occurs,
and the life of the motor is shortened.
This function utilizes the sudden increase in
the torque when the machine returns to the
zero point to issue a command to stop the
motor.
TORQUE LOOP MODE
Also called the current loop mode.
Refer to "POSITIONING LOOP MODE".
TORQUE RIPPLE
Torque width variations, deviations in the
torque.
TRACKING FUNCTION
In this function, positioning is carried out at a
speed relative to a moving target object by
inputting the movement amount from an
external encoder and adding it to the servo
command value.