



















12 - 41
MELSEC-
A
12 CONTROL AUXILIARY FUNCTIONS
(2) Precaution during control
(a) When changing the speed during continuous path control, the speed change
will be ignored if there is not enough distance remaining to carry out the
change.
(b) A warning "deceleration and stop speed change" (warning code: 500)
occurs and the speed cannot be changed in the following cases.
(The value set to "Positioning operation speed override (RWwm+1,
RWwm+9)" is made valid after a deceleration stop.
During deceleration by a stop command
During automatic deceleration during positioning control
(c) When the speed is changed during interpolation control, the required speed
is set in the reference axis.
(3) Setting the override function
The following shows the data settings and sequence program example for setting
the override value of axis 1 to "200%".
(a) Set the following data. (Use the start time chart shown in section (2) below
as a reference, and set using the sequence program shown in section (3).)
Setting item
Setting
value
Setting details
Remote register
Axis 1 Axis 2
Positioning operation speed
override
200 Set the new speed as a percentage (%). RWwm+1 RWwm+9
* Refer to section "3.5 Remote registers" for details on the setting details.
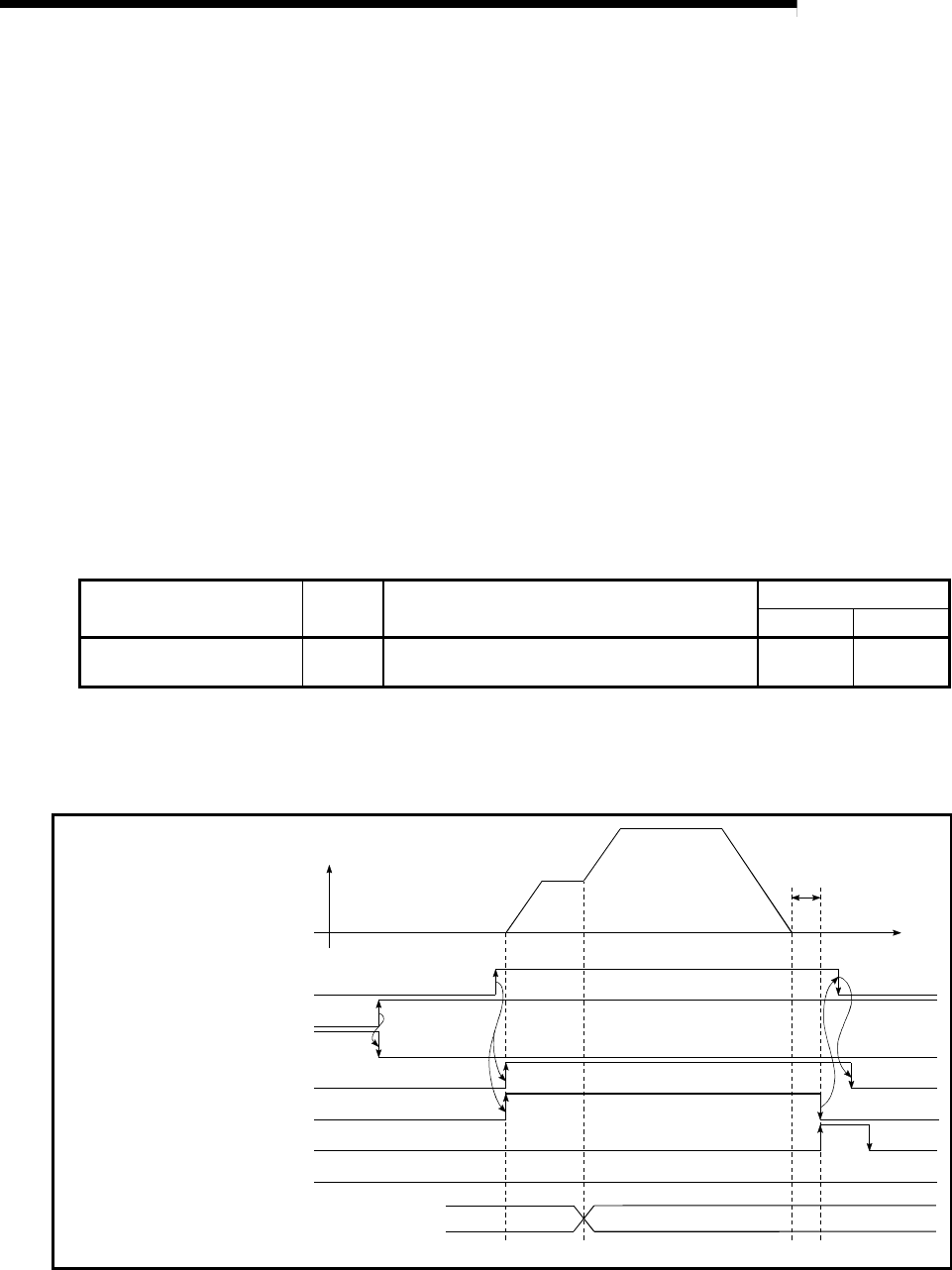
(b) The following shows a time chart for changing the speed using the override
function.
Positioning operation
speed override
V
t
Dwell time
200
BUSY signal
Error detection signal
Remote station READY signal
Positioning start signal
Positioning complete signal
D75P2 READY signal
Start complete signal
[RY(n+1)0]
[RX(n+7)B]
[RXn0]
[RXn1]
[RXn4]
[RXn7]
[RXnA]
[RWwm+1, RWwm+9]
Fig. 12.28 Time chart for changing the speed using the override function