



















5 - 47
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
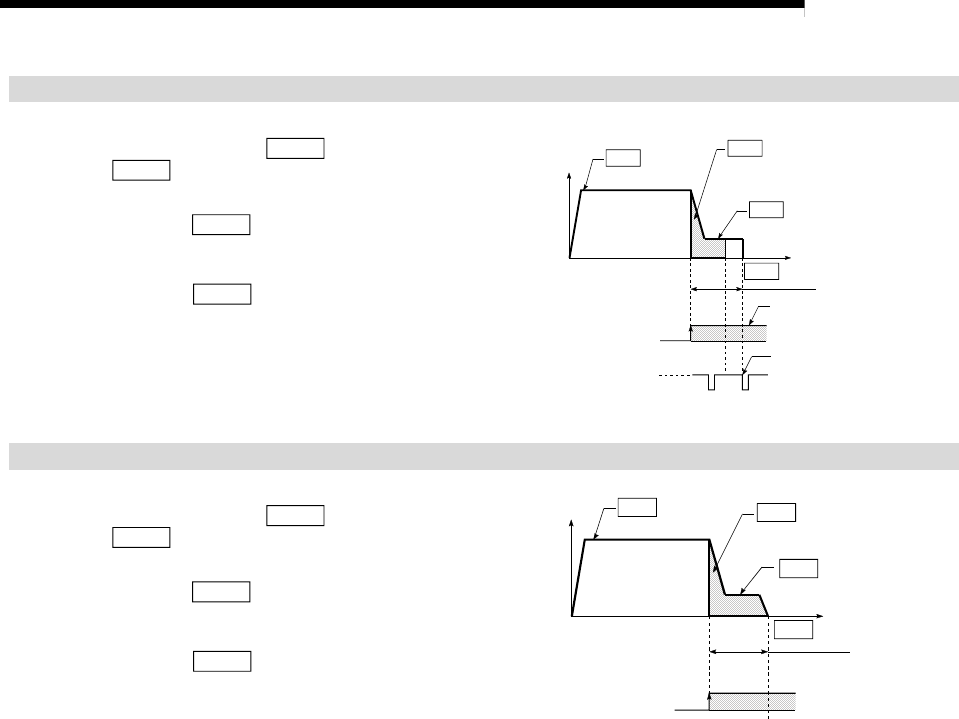
4 : Count method 1)
(1) Start machine zero point return.
(Start movement at the "
Pr.48
Zero point return speed" in
the "
Pr.46
Zero point return direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to "
Pr.49
Creep speed", and move with the
creep speed.
(4) After the near-point dog turns ON and the movement
amount set in "
Pr.52
Setting for the movement amount
after near-point dog ON" has passed, the pulse output from
the D75P2 stops with the first zero point signal (single-pulse
output per motor revolution), and the machine zero point
return is completed.
t
V
ON
(4)
(3)
(2)
(1)
Near-point dog OFF
Zero point signal
Zero point
return speed
Pr.48
Pr.49 Creep speed
Pr.52
Setting for the movement
amount after near-poing dog ON
First zero point after moving the
movement amount after near-
point dog ON
Movement amount after
near-point dog ON
Md.44
The near-point dog must turn OFF
at a sufficient distance away from
the zero point position.
5 : Count method 2)
(1) Start machine zero point return.
(Start movement at the "
Pr.48
Zero point return speed" in
the "
Pr.46
Zero point return direction".)
(2) Detect the near-point dog ON, and start deceleration.
(3) Decelerate to "
Pr.49
Creep speed", and move with the
creep speed.
(4) After the near-point dog turns ON and the movement
amount set in "
Pr.52
Setting for the movement amount
after near-point dog ON" has passed, the pulse output from
the D75P2 stops, and the machine zero point return is
completed.
t
V
ON
(1)
(2)
(3)
(4)
Near-point dog OFF
Movement amount after
near-point dog ON
Md.44
Zero point
return speed
Pr.48
Pr.49 Creep speed
Pr.52
Setting for the movement
amount after near-poing dog ON