


















5 - 33
MELSEC-
A
5 DATA USED FOR POSITIONING CONTROL
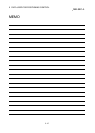
Item
Setting value, setting range
Default
value
Setting value buffer
memory address
Value set with peripheral device
Value set with
sequence program
Axis 1 Axis 2
Pr.20
Speed changeover
mode
0 : Standard speed changeover
mode
0
0 26 176
1 : Front-loading speed changeover
mode
1
Pr.21
Interpolation speed
designation method
0 : Composite speed 0
0 27 177
1 : Reference axis speed 1
Pr.22
Current feed value
during speed control
0 : Do not update current feed value 0
0 28 178
1 : Update current feed value 1
2 : Clear current feed value to zero 2
Pr.23
Manual pulse
generator selection
0 : Ignore manual pulse generator
operation
0
Axis 1 = 1
Axis 2 = 2
29 179
1 : Use manual pulse generator 1 1
2 : Use manual pulse generator 2 2
3 : Use manual pulse generator 3 3
Pr.24
Logic selection for
pulse output to the
drive unit
0 : Positive logic 0
0 30 180
1 : Negative logic 1
Pr.25
Size selection for
acceleration/
deceleration time
0 : 1-word type (1 to 65535ms) 0
0 31 181
1 : 2-word type (1 to 8388608ms) 1
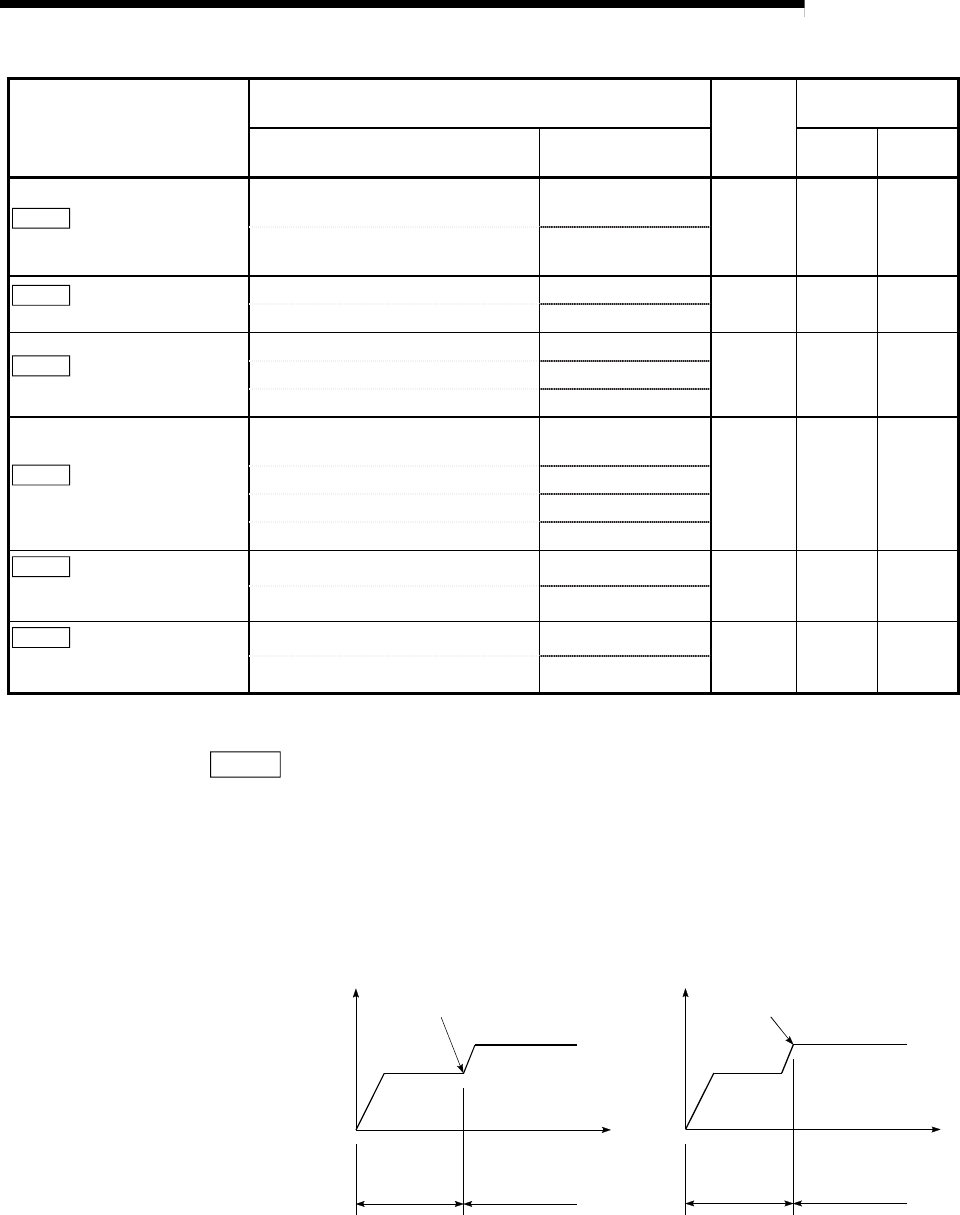
Pr.20
Speed changeover mode
Set whether to change the speed changeover mode with the standard changeover
or front-loading changeover mode.
0 : Standard changeover .......... Change the speed when executing the next
positioning data.
1 : Front-loading changeover .... The speed changes at the end of the positioning
data currently being executed.
t
n
n+1
Change the speed when
executing the next positioning data
Speed
n: Positioning
data No.
<For standard changeover>
<For front-loading changeover>
The next positioning data starts
positioning at the designated speed
t
nn+1
Speed