
















6 - 23
MELSEC-
A
6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL
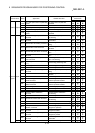
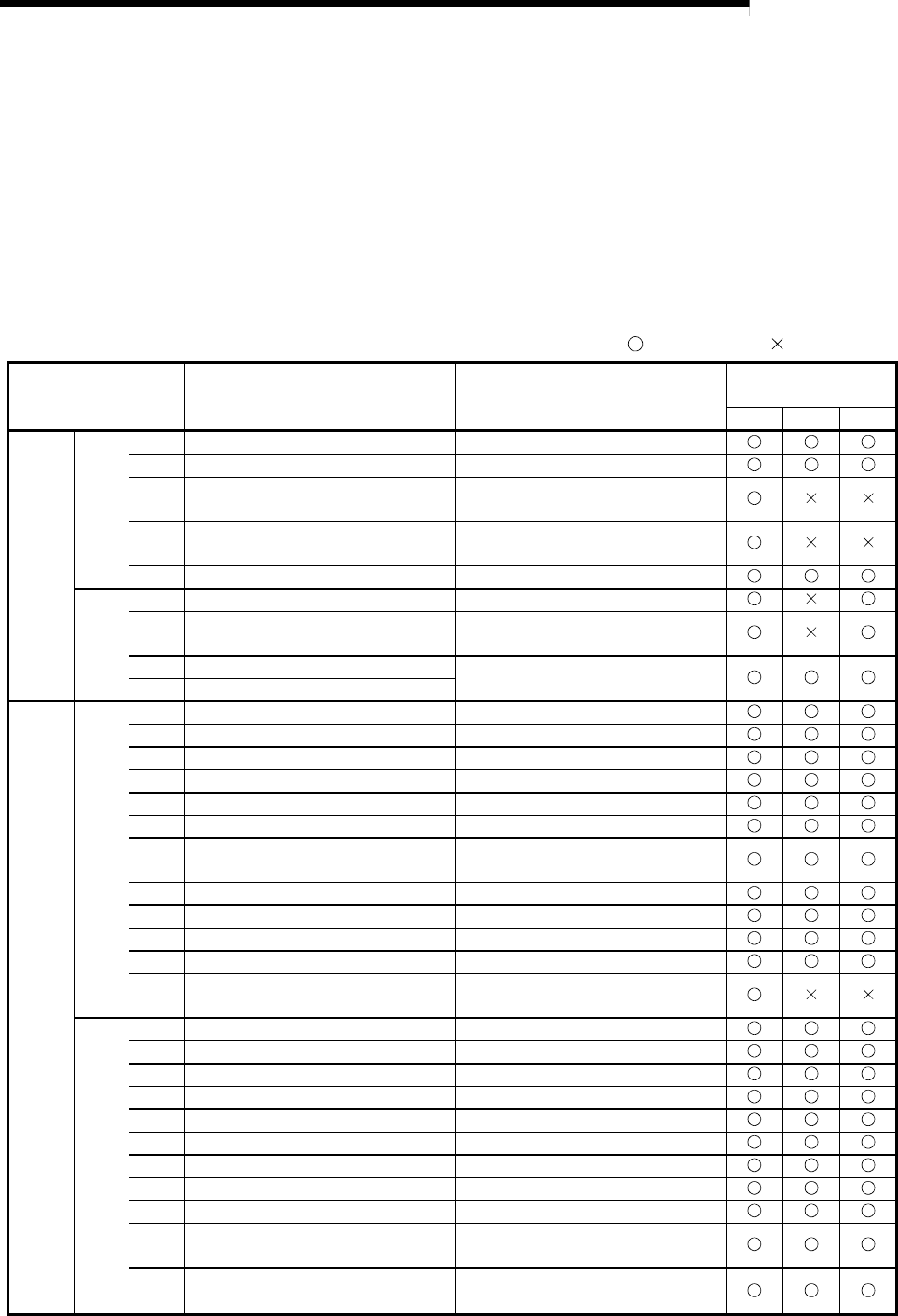
6.3 List of devices used
The application of the input/output Nos. [X] [Y], internal relays [M] and data registers
[D] used in this chapter are shown below.
A : Program used when the FROM/TO commands are used in the ACPU
Ad : Program used when the dedicated commands are used in the ACPU
Q/QnA : Program used when the dedicated commands are used in the QCPU
(Q mode) or QnACPU
: Already used, : Not yet used
Device name Device Application Details when ON
Program example that
uses device
A Ad Q/QnA
Master
module
Input
X0 Module fault Module fault
X1 Host station data link status During data link
X6
Buffer memory parameter-based
data link start normal completion
Data link start normal completion
X7
Buffer memory parameter-based
data link start abnormal completion
Data link start abnormal completion
XF Module ready Module operable
Output
Y0 Refresh instruction Valid
Y6
Buffer memory parameter-based
data link start request
Data link start request
Y1C Bank change designation
Bank is changed according to
ON/OFF combination
Y1D Bank change designation
D75P2
Input
X100 D75P2 READY D75P2 not ready
X101 Axis 1 start complete Start complete
X104 Axis 1 BUSY BUSY (operating)
X107 Axis 1 positioning complete Positioning complete
X10A Axis 1 error detection Error detection
X10D Axis 1 M code ON M code outputting
X111
Axis 1 speed change processing
flag
Speed change processing
X11F Axis 1 zero point return request flag Zero point return requesting
X178 Initial data process request Initial data process requesting
X179 Initial data setting complete Initial data setting complete
X17B Remote station READY Positioning operation possible
X17E
Intelligent device station access
complete
Intelligent device station access
complete
Output
Y110 Axis 1 positioning start Positioning start requested
Y113 Axis 1 stop Axis stop requested
Y116 Axis 1 forward run JOG start Forward run JOG starting
Y117 Axis 1 reverse run JOG start Reverse run JOG starting
Y120 Axis 1 servo ON Servo ON
Y124 Axis 1 error reset Error reset requested
Y125 Axis 1 restart command Restart commanded
Y126 Axis 1 M code OFF request M code OFF requested
Y127 Axis 1 speed change request Speed change requested
Y128
Axis 1 speed/position changeover
enable flag
Axis 1 speed/position changeover
enable
Y129
Axis 1 manual pulse generator
enable flag
Manual pulse generator operation
enable