

















2 - 9
MELSEC-
A
2 SYSTEM CONFIGURATION
*
1
Limited to the case where "
Cd. 21
Speed/position changeover control
movement amount change register" and " Cd. 36 Speed/position changeover
control (ABS mode) function valid flag" is not set.
*
2
Limited to the case where " Cd. 31 Positioning starting point number" is used
as "0 (default value)".
*
3
Limited to the case where " Cd. 23 Manual pulse generator 1 pulse input
magnification" is used as "1 time (default value)".
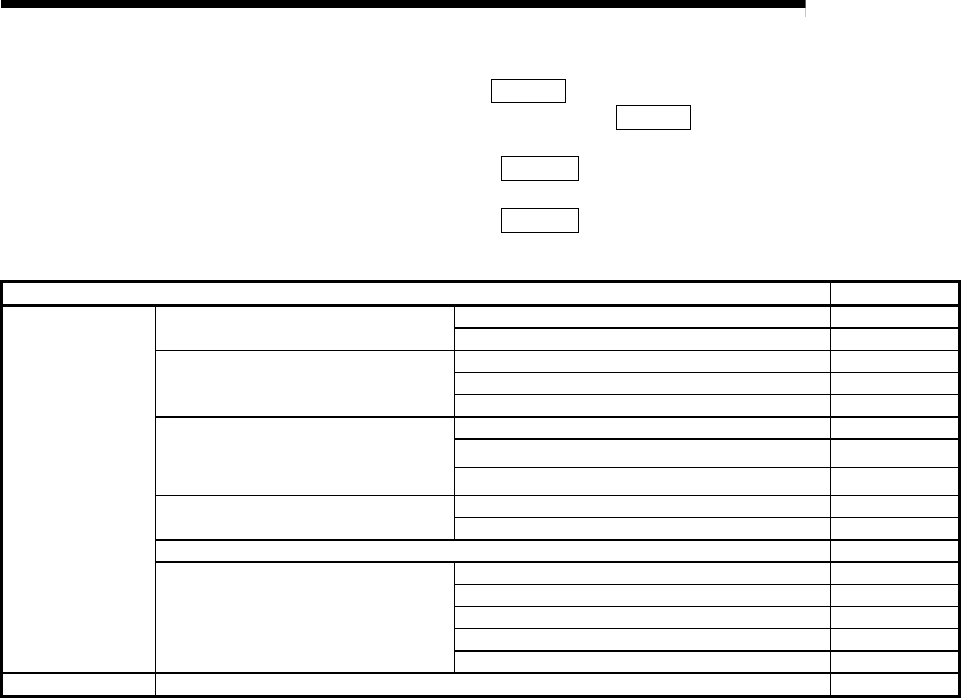
Function Reference
Auxiliary functions
Functions characteristic to machine
zero point return
Zero point return retry function Section 12.2.1
Zero point shift function Section 12.2.2
Functions that compensate control
Backlash compensation function Section 12.3.1
Electronic gear function Section 12.3.2
Near pass mode function Section 12.3.3
Functions that limit control
Speed limit function Section 12.4.1
Software stroke limit function
Section 12.4.3
Hardware stroke limit function
Section 12.4.4
Functions that change control details
Speed change function Section 12.5.1
Override function Section 12.5.2
Absolute position restoration function Section 12.6
Other functions
M code output function Section 12.7.3
Command in-position function Section 12.7.5
Stepping motor mode function Section 12.7.6
Acceleration/deceleration processing function Section 12.7.7
Indirectly specification function Section 12.7.8
Common function LED display function Section 13.4
(b) Functions that require transient transmission (Use them after
examination of the following restrictions)
The following gives the functions that can be achieved by use of transient
transmission.
The following functions that can be achieved by use of transient
transmission are more complicated in sequence program and further take
longer processing time than the basic functions that can be achieved by
use of cyclic transmission since they require access to the D75P2 buffer
memory.
After confirming the transmission delay time (refer to Section 3.6), it is
recommended to use them in applications that do not need fast processing.
When fast processing is required, it is recommended to perform control with
"(a) Functions that can be achieved by cyclic transmission only".