



















9 - 50
MELSEC-
A
9 MAIN POSITIONING CONTROL
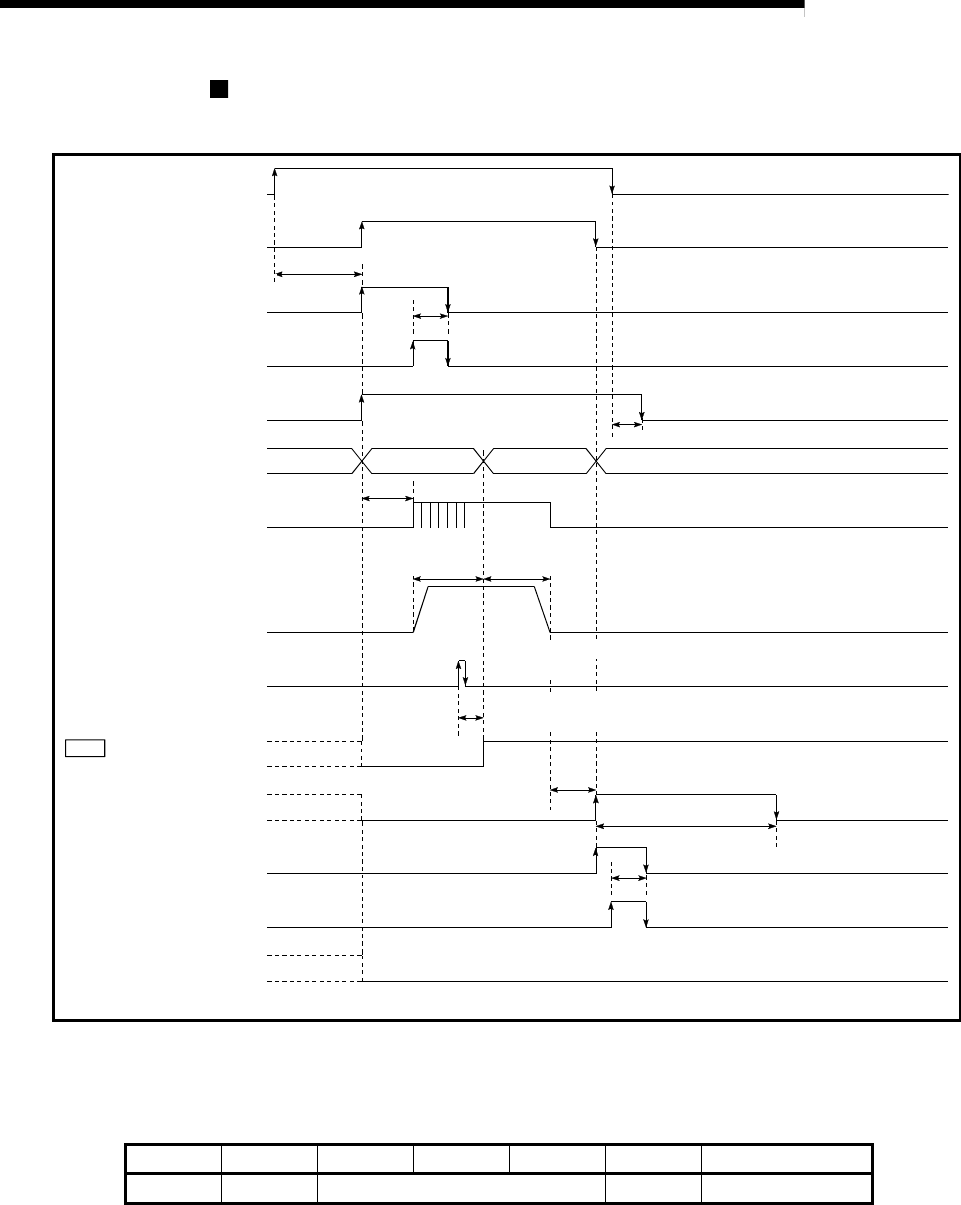
Operation timing and processing time during speed/position changeover
control (Common to INC mode and ABS mode)
Positioning start signal
[RY(n+1)0, RY(n+1)1]
BUSY signal
M code ON signal
[RXnD, RXnE](WITH mode)
Standing by
In speed control
Start complete signal
Output pulse to external source
(PULSE)
Positioning operation
Positioning complete signal
M code ON signal (AFTER mode)
t1
t2
t3
t4
t5
t2
t7
*
In position control
Speed
control
Position
control
External speed/position
changeover command
*
t6
* Speed control carried out until speed/position changeover
signal turns ON
Position control movement amount is from the input position of
the external speed/position changeover signal
Axis operation status
Cd. 21 Speed/position changeover
control movement amount
change register
Zero point return complete flag
M code OFF request
M code OFF request
*
Standing by
[RXn4, RXn5]
[RXn1, RXn2]
[RXn7, RXn8]
[RXnD, RXnE]
[RY(n+2)6, RY(n+4)6]
[RWrn+7, RWrn+15]
[RY(n+2)6, RY(n+4)6]
[RY(n+2)0, RY(n+5)0]
Fig. 9.11 Operation timing and processing time during speed/position changeover control
Normal timing time Unit: [ms]
t1 t2 t3 t4 t5 t6 t7
5 to 15 0 to 60 0 to 3.5 1 Follows parameters
The t1 timing time could be delayed by the following factors.
1) Operation state of other axes
2) Presence of intervention from peripheral device during start process
3) Details of positioning data to be started